Mikroprotsessorsüsteemide otstarve. Sissejuhatus: mikroprotsessorid, mikroprotsessorsüsteemid Mikroprotsessorsüsteemi koostis
Mikroprotsessorite (MP) ja mikroarvutite arvukatest ja mitmekesistest rakendusvaldkondadest on mahu ja kasutuse osas ühel esikohal mikroprotsessorsüsteemid - objektorienteeritud arvutussüsteemid, näiteks juhtimiseks, diagnostikaks, digitaalsignaali töötlemiseks. ja pilte.
Mikroprotsessorsüsteemides on selline oluline mikroprotsessorite omadus nagu kinnistatavus– võime tuua arvutitehnoloogiat mõõtmis-, juhtimis-, infotöötlus- või diagnostikaobjektile lähemale.
Peamised ülesanded, mida mikroprotsessorsüsteemide abil saab lahendada, on järgmised:
– keeruka tehnoloogilise protsessi või tehnilise objekti juhtimine kindlaksmääratud algoritmide järgi;
– digitaalne signaalitöötlus otse signaaliallika asukohas;
– pilditöötlus – filtreerimine, teravustamine, kontuurimine, skaleerimine jne. tehnilise nägemise süsteemides tööstusrobotites, radarisüsteemides, seiresüsteemides, navigatsioonis jne.
– automaatsete mõõtmis-, juhtimis- ja prognoosisüsteemide kohandamine muutuvatele tingimustele;
– paindlike häälestatavate juhtimissüsteemide loomine, digitaalne signaali- ja pilditöötlus;
– teabe kogumine ja eeltöötlemine;
- multifunktsionaalsete seadmete loomine, olemasolevate seadmete võimaluste laiendamine;
– intelligentsete seadmete ja süsteemide loomine, mis tõstab olemasolevate seadmete ja seadmete intelligentsuse taset;
– enesediagnostika ja seadmete testimise rakendamine.
Võimalus rakendada neid funktsioone mikroprotsessorsüsteemides koos elektroonika ja side saavutustega, mõõtmistes signaalitöötluse matemaatiliste meetodite väljatöötamisega ja vastava tarkvara väljatöötamisega on loonud vajalikud eeldused uute põlvkondade mikroprotsessorsüsteemide tekkeks. ja seadmed, millel on järgmised võimalused:
- igat tüüpi teabetöötluse täielik automatiseerimine, kõigi süsteemi pakutavate funktsioonide integreerimine ja koordineerimine;
- süsteemi koostise suurendamine ja funktsioonide laiendamine tänu tarkvara ehituse ja arendamise tüvi-moodulstruktuurile;
– mitmesugused algoritmid ja mõõtmismeetodid;
- ülesannete detsentraliseerimine funktsionaalsete, organisatsiooniliste ja territoriaalsete tunnustega, tehisintellekti tööriistade kättesaadavus, süsteemi õppimise võimalus, selle kohandamine ja optimeerimine;
– kõrge töökindlus ja funktsionaalne töökindlus tänu enesediagnostika ja testimisvahenditele ning süsteemihalduse paindlikkusele;
– võimalus liidestada teiste arvutisüsteemidega.
Ülaltoodud ülesannete praktiline elluviimine eeldab riist- ja tarkvara loomise ja arendamisega seotud teaduslike, tehniliste ja tehnoloogiliste küsimuste terviklikku lahendamist, keeruliste protsesside ja tehniliste objektide matemaatilise modelleerimise meetodeid, analoog-digitaal- ja digitaal-digitaaltehnoloogiat. analoogmuundurid (DAC), liides LSI ja muud elektroonilised komponendid , kasutades kaasaegseid sidevahendeid ja lõpuks väljaõppega personali, kes suudab püstitatud ülesandeid asjatundlikult lahendada.
MP-süsteemide ehituspõhimõtted.
Iga mikroprotsessorsüsteemi tuum on mikroprotsessor või lihtsalt protsessor (inglise keelest protsessor). Kõige õigem on see sõna tõlkida vene keelde kui "protsessor", kuna just mikroprotsessor on sõlm, plokk, mis teostab kogu teabe töötlemise mikroprotsessorisüsteemis.
mikroprotsessor nimetame programmiga juhitavat seadet, mis on mõeldud digitaalse teabe töötlemiseks ja seda töötlemist kontrollivate signaalide genereerimiseks.
Ülejäänud sõlmed täidavad ainult abifunktsioone: teabe (sealhulgas juhtimisteabe, st programmide) salvestamine, välisseadmetega suhtlemine, kasutajaga suhtlemine jne. Protsessor asendab praktiliselt kogu "kõva loogika", mida oleks vaja traditsioonilises digitaalsüsteemis. See täidab aritmeetilisi funktsioone (liitmine, korrutamine jne), loogilisi funktsioone (nihutamine, võrdlemine, koodi maskeerimine jne), koodide ajutist salvestamist (siseregistrites), koodide ülekandmist mikroprotsessorisüsteemi sõlmede vahel ja palju muud. Protsessori selliste elementaarsete toimingute arv võib ulatuda mitmesajani. Protsessorit võib võrrelda süsteemi ajuga. Kuid samal ajal tuleb meeles pidada, et protsessor teeb kõik oma toimingud järjestikku, ehk siis üksteise järel omakorda. Muidugi on protsessorid Koos mõne operatsiooni paralleelne täitmine, on ka mikroprotsessorsüsteeme, milles mitu protsessorit töötavad paralleelselt sama ülesandega, kuid need on harvad erandid. Ühest küljest on toimingute järjestikune täitmine vaieldamatu eelis, kuna see võimaldab ainult ühte protsessorit kasutada mis tahes, kõige keerukama infotöötlusalgoritmi täitmiseks. Kuid teisest küljest viib toimingute järjestikune täitmine selleni, et algoritmi täitmise aeg sõltub selle keerukusest. Lihtsad algoritmid töötavad kiiremini kui keerulised. See tähendab, et mikroprotsessorsüsteem on võimeline tegema kõike, kuid see ei tööta liiga kiiresti, sest kõik infovood tuleb läbida ühe sõlme - mikroprotsessori (joonis 1.3). Traditsioonilises digitaalses süsteemis on lihtne korraldada kõigi infovoogude paralleelset töötlemist, aga vooluringi keerulisemaks muutmise hinnaga.
juht
teavet
(programm)
Riis. 1.3. Info liigub mikroprotsessorsüsteemis.
Seega on mikroprotsessor võimeline tegema paljusid toiminguid. Aga kuidas ta teab, mis operatsiooni ta parasjagu tegema peab? See on kindlaks määratud juhtinfo, programm.
Programm on käskude komplekt (juhised) see tähendab digitaalseid koode, mille dešifreerimisel saab protsessor teada, mida ta tegema peab. Programmi algusest lõpuni koostab inimene, programmeerija ja protsessor tegutseb selle programmi kuuleka täitjana, ei näita üles mingit initsiatiivi (kui see muidugi heas korras pole). Seetõttu pole protsessori võrdlemine ajuga kuigi õige. Ta on lihtsalt selle algoritmi täitja, mille inimene on talle eelnevalt kokku pannud. Kõik kõrvalekalded sellest algoritmist võivad olla põhjustatud ainult protsessori või mõne muu mikroprotsessorisüsteemi komponendi talitlushäiretest.
Kõik protsessori poolt täidetavad käsud moodustavad käsuprotsessori süsteemi. Protsessori käsukomplekti struktuur ja maht määravad selle kiiruse, paindlikkuse ja kasutuslihtsuse. Kokku võib protsessoril olla mitukümmend kuni mitusada käsku. Juhendisüsteemi saab kujundada kitsale hulgale lahendatavatele ülesannetele (spetsialiseerunud protsessoritele) või võimalikult laiale hulgale ülesannetele (universaalprotsessoritele). Käsukoodidel võib olla erinev arv numbreid (ühest kuni mitme baitini). Igal käsul on oma täitmise aeg, seega ei sõltu kogu programmi täitmise aeg mitte ainult programmis olevate käskude arvust, vaid ka sellest, milliseid käske kasutatakse.
Käskude täitmiseks sisaldab protsessori struktuur sisemisi registreid, aritmeetilist loogikaüksust (ALU, ALU - Aritmeetiline loogikaüksus), multipleksereid, puhvreid, registreid ja muid sõlme. Kõikide sõlmede tööd sünkroniseeritakse protsessori ühise välise kellasignaaliga. See tähendab, et protsessor on üsna keeruline digitaalne seade (joonis 1.4).
Riis. 1.4. Näide lihtsaima protsessori ülesehitusest.
Mikroprotsessorsüsteemide arendaja jaoks pole aga info protsessori sisemise struktuuri peensuste kohta kuigi oluline. Arendaja peab käsitlema protsessorit kui "musta kasti", mis vastusena sisend- ja juhtkoodidele sooritab üht või teist toimingut ja toodab väljundsignaale.
Arendaja peab teadma käsusüsteemi, protsessori töörežiime, samuti protsessori ja välismaailmaga suhtlemise reegleid või, nagu neid nimetatakse ka, teabevahetusprotokolle. .
Protsessori sisemise struktuuri kohta peate teadma ainult seda, mis on vajalik konkreetse juhise, konkreetse töörežiimi valimiseks.
Mikroprotsessori süsteem - see on andmetöötlus-, juhtimis- ja mõõte- või juhtimissüsteem, mille peamiseks teabetöötlusseadmeks on MP. Mikroprotsessorisüsteem on üles ehitatud mikroprotsessori LSI komplektist.
MPS-süsteemide ehitus põhineb kolmel põhimõttel: selgroog; modulaarsus; mikroprogrammi juhtimine.
Pagasiruumi põhimõte määrab MPS-i funktsionaalplokkide vaheliste ühenduste olemuse – kõik plokid on ühendatud ühtse süsteemisiiniga.
Modulaarsuse põhimõte on see, et süsteem on üles ehitatud piiratud arvu tüüpi struktuurselt ja funktsionaalselt komplekteeritud moodulite baasil. Igal MPS-süsteemi moodulil on kolmas (kõrge takistusega) olekujuhtimise sisend. Seda kirjet nimetatakse СS (Сhір Select) – valik kristall või OE (Output Enabie) – väljumisluba.
CS-signaali toimimine päästiku jaoks on näidatud joonisel fig. 1.5. Esialgne päästiku signaal K kuvatakse väljundil ainult siis, kui see on aktiivne (sisse antud juhul - null) signaali tase CS. Kui CS = 1, asetatakse flip-flop suure takistusega olekusse. Päästiku väljund on kolmestabiilne, see tähendab, et see võib olla ühes kolmest olekust: loogiline üks, loogiline null või kõrge takistus. Igal ajahetkel on MPS-süsteemi siiniga ühendatud ainult kaks moodulit - see, mis võtab vastu ja see, mis edastab teavet. Teised on suure takistusega olekus.
Magistri ja modulaarsuse põhimõtted võimaldavad MP juhtimis- ja arvutusvõimekust tõsta teiste moodulite lisamisega.
Püsivara juhtimise põhimõte seisneb võimaluses sooritada elementaaroperatsioone – mikrokäske (nihe, infoedastus, loogilised toimingud). Teatud mikrokäskude kombinatsiooniga saate luua käskude komplekti, mis vastab kõige paremini süsteemi eesmärgile, st luua tehnoloogiline keel.
Mõelge MPS-i üldistatud plokkskeemile (joonis 1.6.) MPS sisaldab: keskseadet (CPU), PZP, OZP; katkestussüsteem, taimer, UVV. I/O seadmed on süsteemisiiniga ühendatud I/O liideste kaudu.
Kirjutusmälu ja muutmälu moodustavad mälusüsteemi, mis on loodud kahendarvude kujul teabe salvestamiseks. Kirjutuskaitstud mälu on mõeldud programmide, tabelite, konstantide salvestamiseks.
Muutmälu – arvutuste vahetulemuste salvestamiseks. Mälu on korraldatud lahtrite massiivina, millest igaühel on oma aadress ja mis sisaldab baiti või sõna.
CPU moodul töötleb andmeid ja haldab kõiki teisi süsteemi mooduleid. Keskprotsessor sisaldab lisaks LSI MP-le sünkroniseerimisahelaid ja liidest süsteemisiiniga. See tõmbab mälust käsukoodid, dekrüpteerib need ja käivitab. Käsu – käsutsükli – täitmise ajal teostab CPU järgmisi toiminguid:
Määrab aadressibussil oleva käsu aadressi AB;
Hangib mälust käsukoodi ja dekrüpteerib selle;
Arvutab operandide aadresse ja loeb andmeid;
Teostab käsuga määratud toimingu;
Aktsepteerib väliseid juhtsignaale (näiteks katkestamistaotlus);
Genereerib mälu tööks vajalikud oleku- ja juhtsignaalid
ja UVV.
I / O-seadmed või välisseadmed on seadmed, mis on loodud teabe sisestamiseks MP-sse või teabe väljastamiseks sellest. ICD-de näideteks on kuvarid, printerid, klaviatuurid, digitaal-analoog- ja analoog-digitaalmuundurid, releed ja lülitid. Õhkpuhastite ühendamiseks süsteemisiiniga peavad nende signaalid vastama teatud standarditele. See saavutatakse I/O liideste abil.
Sisend-väljundliidesed täidavad õhuvoolu signaalide ja MP-süsteemi siini signaalide sobitamise funktsiooni. Neid nimetatakse ka kontrolleriteks või adapteriteks. Mikroprotsessor pääseb liidestele ligi spetsiaalsete I/O käskude abil. Samal ajal paneb saadik bussile aadresse AB liidese aadress ja andmesiini DB loeb andmeid sisendseadmest või kirjutab väljundseadmesse. Joonisel fig. 1.6 näitab ühte sisendliidest ja ühte väljundliidest.
Katkestuste süsteem võimaldab MPS-il reageerida välistele signaalidele – katkestuspäringutele, mille allikateks võivad olla: välisseadmete valmisolekusignaalid, generaatorite signaalid, andurite väljundite signaalid. Katkestustaotluse korral katkestab CPU põhiprogrammi ja jätkab katkestustaotluse teenuse rutiini täitmist. Katkestuste süsteemi loomiseks sisaldavad MPC-d spetsiaalsete programmeeritavate katkestuskontrollerite LSI-d.
Taimer on mõeldud ajastusega seotud funktsioonide rakendamiseks. Pärast MP laadimist taimerisse numbri, mis määrab sageduse, viivituse või jaotusteguri, rakendab taimer soovitud funktsiooni iseseisvalt.
Valmistas Sergei
Magnitogorski Riiklik Kutsepedagoogika Kolledž
Magnitogorsk, 2005
1. Mikroprotsessorsüsteemi loogiline struktuur
Mikroprotsessoril põhinevate seire-, juhtimis- või arvutussüsteemide projekteerimisel on vaja välja selgitada ja kirjeldada süsteemis täidetavaid funktsioone ning seejärel kooskõlastada need nende mikroprotsessorite võimalustega, mida projekteeritavas süsteemis kasutada saab.
Tõeline mikroprotsessoril põhinev elektrooniline süsteem sisaldab märkimisväärsel hulgal funktsionaalseid seadmeid, millest üks on mikroprotsessor. Kõikidel süsteemiseadmetel on standardne liides ja need on ühendatud ühe infomagistraaliga, nagu on näidatud joonisel 1.
Mikroprotsessor võib olenevalt süsteemi nõuetest olla ühe kiibiga või ühe plaadiga seade, mis on loodud mikroprotsessori LSI mitme kiibi komplekti alusel. Suure jõudlusega süsteemides on mikroprotsessor ehitatud LSI bipolaarsete mikroprotsessori sektsioonide baasil.
Mikroprotsessor täidab süsteemis keskjuhtimisseadme ja aritmeetika-loogilise andmemuundusseadme funktsioone. Juhtseadmena genereerib see kella- ja loogikasignaalide jadasid, mis määravad süsteemi kõigi loogikaseadmete tööjärjestuse. Mikroprotsessor seab ja sooritab järjestikku mikrooperatsioone programmikäskude süsteemimälust väljavõtmiseks, nende dekodeerimiseks ja täitmiseks. Mikroprotsessori töö tüüp määratakse juhendis oleva operatsioonikoodi järgi. Nende koodide kohaselt teostab mikroprotsessor aritmeetilisi, loogilisi või muid toiminguid kahend- või kodeeritud BCD-s esitatud arvudega.
Arvu, mis läbivad mikroprotsessori aritmeetilises loogikaüksuses operatiivseid teisendusi, nimetatakse operandideks. Operandiks võib olla üks algarvudest, tulemus, konstant või mõni parameeter. Toiming mikroprotsessoris sooritatakse ühe või kahe operandiga.
Mikroprotsessorsüsteemi mälu on füüsiliselt realiseeritud erinevate mälude baasil. Tehniline ja majanduslik teostatavus viib pooljuht-püsi- ja muutmäluseadmetel ning magnetilistel välismäluseadmetel põhineva hierarhilise mälu ehitamiseni.
Joonis 1 Mikroprotsessorsüsteemi loogiline struktuur
Pooljuhtide kirjutuskaitstud mäluseadmed ROM võimaldavad süsteemi töö ajal lugeda ainult eelsalvestatud andmeid. Need on suure töökiirusega ja mittelenduvad, st.е. säilitada teavet, kui toide välja lülitatakse.
Pooljuht-RAM-seadmed töötavad töörežiimides (mis langeb kokku mikroprotsessori tempoga) andmete kirjutamise ja lugemise režiimides. RAM-i miinuseks on nende volatiilsus, st. salvestatud teabe kadu, kui toide välja lülitatakse.
Süsteemimälu on adresseeritav, st. iga sõna salvestatakse mälulahtrisse, millel on oma kordumatu aadress. Sõna on kahendühikute (bittide) kogum - kahendnumbrid, mida tõlgendatakse eraldi numbrina või mitme kahendnumbrite semantilise rühmana. Numbri mälust saamiseks või numbri mällu kirjutamiseks peate selle aadressi mällu täpselt määrama ja tegema toimingu mälust andmete lugemiseks.
Andmesisestusseadmed (IDV) - mis tahes vahendid, mis on ette nähtud andmete edastamiseks väljastpoolt mikroprotsessori registritesse või mällu (juhtpaneeli klaviatuur, sisend perfolintidelt ja perfokaartidelt, magnetlintide välised salvestusseadmed, kassetid, kettad, kuvarid jne). .
Andmeväljundseadmed (UVvyv) - kõik vahendid, mis on võimelised vastu võtma mikroprotsessori registritest või mälurakkudest edastatavaid andmeid (kuvarid, trükiseadmed, välised salvestusseadmed, juhtpaneel jne).
Erinevate andmesisestus- või väljundseadmete (aga ka kombineeritud sisend-väljundseadmete) ühendamiseks on vaja viia kõik nende ühendused ja signaalid standardvormi, s.o. liideste koordineerimiseks. Selleks kasutatakse spetsiaalset riistvaraüksust - IC infokontrollerit, millel on infomagistraaliga ühendamise poolel standardliides ja sisend-väljundseadmete poolel mittestandardne liides, s.t. mis on liideste liideste konverter.
Mikroprotsessorit MP, RAM-i ja ROM-i koos UVvyviga, mis on mõeldud tööks inimese või muu elektroonilise süsteemiga, nimetatakse mikroarvutiks. Mikroarvuti on arvuti, mille keskosa protsessori, RAM-i, ROM-i ja infokontrolleri osana on ehitatud LSI baasil. LSI kasutamine peamiste elementkomponentidena annab mikroarvutitele selliseid eeliseid võrreldes teist tüüpi arvutitega nagu kompaktsus, töökindlus, madal materjalikulu, madal energiatarve ja maksumus. Kuid mikroarvuti põhistruktuur ja mikroprotsessori kiiruspiirangud määravad mikroarvuti mõõdukad jõudlusomadused. See viitab mikroarvutitele, mis põhinevad ühel või mitmel kiibil asuvatel mikroprotsessoritel. Bipolaarse mikroprotsessori sektsioonidel põhinevas mikroarvutis on võimalik saavutada kõrge jõudlus tänu andmekonveieri töötlemise rakendamisele ja arvutusprotsessi kiirele ülitõhusale juhtimisele isegi magistraalstruktuuriga.
Mikroarvutist saab elektroonilise juhtimis-, juhtimis- ja arvutussüsteemi keskne osa, kui see viiakse mõne objekti (protsessi) juhtimisahelasse. Mikroarvutiga liidestamiseks peab objekt (protsess) olema varustatud olekuandurite ja täiturmehhanismidega. Andurid toimivad mikroarvutisse sisestatava teabe allikana ja täiturmehhanismid toimivad väljundinformatsiooni vastuvõtjatena. Liideste koordineerimiseks toimub andurite ja täiturmehhanismide ühendamine süsteemis andurite ja täiturmehhanismide liidesüksuste kaudu.
Sõltuvalt objekti (protsessi) omadustest ja mikroprotsessori võimalustest määratakse iga seadme või ploki keerukus projekteerimisetapis. Süsteemi osad võivad areneda või degenereeruda, kuid kõigi elektrooniliste juhtimissüsteemide ehituse ja töötamise üldpõhimõte tuleb tagada. Tarkvara ja riistvara funktsioonide vahetu seose tõttu on elektroonilise süsteemi ehitamisel võimalik arendada kas riistvara või muuta tarkvara keerukamaks. Just need asjaolud määravad ära mikroprotsessorjuhtimissüsteemide massilised võimalused peaaegu kõigis valdkondades.
Universaalse programmeeritava kontrolleri loogiline struktuur.
Kontroller (kohalik juhtseade) on vajalik teabe sisend-väljundseadmete (ABV) juhtimiseks. See tagab arvuti infokanali ja ABB osade, mis on juhtimisteabe ja -andmete allikad või vastuvõtjad, elektromehaanilise ja loogilise liidese, määrab teabe vahelise teabe liikumise järjestuse, koguse, elektrilised parameetrid, asukoha ajas ja suuna. kanalid ja ABB. Kontrolleri põhiülesanne on luua tingimused üksikute ventiilide või nende rühmade avamiseks ja lukustamiseks, samuti erinevat tüüpi elektrimootorite, elektromehaaniliste lülitite käivitamiseks, solenoidide ergutamiseks, võimendatud ja vormitud erinevate signaalide vastuvõtmiseks ABB infoanduritelt.
Süsteemi osadeks funktsionaalse jaotamise võimaluste korral on ABB-ga liideseüksuse riistvara integreeritud mikroprotsessori LSI-ga või teostatakse eraldi liidese (liidese) LSI kujul.
Kontrollerit saab realiseerida jäiga ühendusena väravagruppide, plätude jms vahel. riistvaraloogikal põhineva digitaalse masinana. Integraallülituspakettide elektroonikakomponentide arvu minimeerimine põhjustab tavaliselt ebaühtlase elektroonilise struktuuri, mis on spetsialiseerunud ainult konkreetsele seadmele. Ajastusskeemi muutmine või uute signaalide kasutuselevõtt riistvarakontrolleris toob kaasa vajaduse kogu kontroller või selle osa ümber kujundada ja ümber kujundada.
Universaalsed programmeeritavad kontrollerid on rakendatud ühe kiibiga LSI-na või LSI mikroprotsessorikomplektide sektsioonide alusel. Sellistes kontrollerites genereeritakse erinevaid signaalide ja nende jadade ajastusskeeme mitte tavaliste kellageneraatorite signaalide jaotamisel juhtmega ühenduste kaudu, vaid käsujadade (mikrokäskude) teisendamise teel. Tarkvara ja püsivara paindlikkuse tõttu toimub programmeeritava kontrolleri kohandamine konkreetsele rakendusalale ümberprogrammeerimise teel, mis ei mõjuta kontrolleri riistvaralist rakendamist või põhjustab ainult juhtmälu sisu ülekirjutamist. seadmeid.
Elementide kõrge integratsiooniastmega integraallülituste tehnilised ja majanduslikud parameetrid võimaldavad juhtida arvuti ABB teavet juhtarvutite struktuuridele sarnaste elektrooniliste struktuuride abil. See tagab: 1) funktsionaalse paindlikkuse täiustatud käsusüsteemide kasutamise ja nende põhjal erinevate keerukate signaalijadade konstrueerimise kaudu, mis võimaldab arvestada süsteemi reaktsiooniga väljundsignaalidele; 2) hajutatud juhtimismeetodite kasutamine hierarhilistes juhtimissüsteemides, kui teabe teisendamise protsessi optimeerimine toimub juhtimise ülemisel tasemel ja otsest lokaalset juhtimist teostab sisseehitatud kontroller, mis tajub ja tõlgendab nii ABB olek ja kõrgema juhtimistaseme vahendite juhtsignaalid; 3) ABB juhtimisseadme spetsialiseerumise ja muutmise lihtsus.
Saada oma head tööd teadmistebaasi on lihtne. Kasutage allolevat vormi
Üliõpilased, magistrandid, noored teadlased, kes kasutavad teadmistebaasi oma õpingutes ja töös, on teile väga tänulikud.
Majutatud aadressil http://www.allbest.ru/
Ukraina haridus- ja teadusministeerium
Ukraina Riiklik Tehnikaülikool
"Kiievi Polütehniline Instituut"
Rakendusmatemaatika osakond
Mikroprotsessorid ja mikroprotsessorsüsteemid
Esitatud:
Tšetverik Valeria Jaroslavovna
Rühm: KM-12
Kontrollis: Kopychko S.N.
- Sissejuhatus
- 1. Mikroprotsessorite areng
- 2.1 Assotsiatiivsed protsessorid
- 2.2 Maatriksprotsessorid
- 2.3 DNA protsessorid
- 2.4 Mobiilsideprotsessorid
- 2.6 Andmebaasiprotsessorid
- 2.7 Vooprotsessorid
- 2.9 Signaaliprotsessorid
- 3. Multiprotsessorsüsteemid
- 3.4 Jagatud mäluga mikroprotsessorsüsteemid
- 3.5 Kohaliku mäluga mikroprotsessorsüsteem
- 6. Individuaalne ülesanne
- Kirjandus
1. Mikroprotsessorite areng
Protsessorite ajalugu sai alguse 1979. aastal, kui Intel andis välja esimese i4004 mikroprotsessori. Sellel oli 4-bitine andmelaius, võime adresseerida 640 baiti mälu, taktsagedus 108 kHz ja jõudlus 0,06 MIPS. Selline protsessor võiks juba toimida kalkulaatori arvutustuumikuna. See sisaldas 2300 transistorit ja teostati 10 mikroni eraldusvõimega tehnoloogia abil. Aasta hiljem ilmus selle 8-bitine "sugulane" - i8008, mis adresseeris juba 16 KB mälu.
1974. aastal ilmus 8-bitine i8080 protsessor, millest sai väga populaarne seade. Sellel oli juba 2 MHz sagedus ja 64 KB mälu. 6000 transistori võimaldas mahutada 6-mikronist tootmistehnoloogiat. Protsessor vajas kolme toiteallikat (+5V, +12V ja -5V) ning keerukat kahekontaktilist sünkroniseerimist. Sellele protsessorile ehitati mitmesuguseid terminale, kontrollereid ja isegi esimene Altairi arvuti. Meie riigis muutusid protsessorid 580IK80 ja KR580VM80 8086 hilinenud kajaks, mille põhjal ehitati 80ndate alguses ja keskel palju "kodukootud" personaalarvuteid.
Järgmine samm oli i8085 protsessor (5 MHz, 0,37 MIPS, 6500 transistorit, 3-mikroniline tehnoloogia). See säilitas populaarse 8080 registriarhitektuuri ja tarkvara ühilduvuse, kuid lisas jadaliidese pordi, kõrvaldas spetsiaalsed tugi-IC-d (kellageneraator ja süsteemikontroller) ning muutis veidi välist liidest. Peamine kingitus seadmete arendajatele oli üks toitepinge + 5V.
Variatsioon 8080 ja 8085 teemale on Zilogi Z80 protsessor. Säilitades tarkvara ühilduvuse 8080-ga, viidi sellesse täiendavad registrid, mis võimaldasid jõudlust oluliselt parandada. Tulemus oli muljetavaldav – kuni viimase ajani demonstreerisid Z80-le ehitatud populaarsed Sinclairi arvutid mängudes graafikat, mis ei jäänud alla 16-bitise 286 protsessoriga arvutitele.
Esimese 16-bitise 8086 protsessori andis Intel välja 1978. aastal. Sagedus on 5 MHz, jõudlus 0,33 MIPS, kuid juhised on juba 16-bitiste operandidega (hiljem ilmusid 8 ja 10 MHz protsessorid). 3 mikroni tehnoloogia, 29 tuhat transistorit. Adresseeritav mälu 1 MB. Registriarhitektuur ja juhiste süsteem erines oluliselt 8080-st, kuid üldised ideed on loomulikult jälgitavad. Aasta hiljem ilmus 8088 - sama protsessor, kuid 8-bitise andmesiiniga. Sellest sai alguse IBM PC ajalugu, mis jättis jälje selle Inteli protsessorite sarja edasiarendamisele. Arvutiarhitektuuri massiline levitamine ja avatus on sisendanud tarkvaralaviini, mille on välja töötanud suured, keskmised ja väikesed ettevõtted ning üksikud entusiastid. Tehniline nõudis (ja nõuab siiani) protsessorite arendamist, kuid arvutitarkvara koormus, mis peab jooksma uuematel protsessoritel, nõudis ka tarkvara tagasiühilduvust. Seega tuli kõik uuendused järgnevate protsessorite arhitektuuris kinnitada olemasolevale tuumale. Ja siis veel PC arhitektuur ise, "visatud", näiteks katkestusvektori kasutamise keerukus. Intel reserveeris esimesed 32 vektorit "ametlikuks kasutamiseks", kuid arvuti BIOS-i katkestused said neist "üle". Üks tulemustest on täiendav viis vanemates arvutites kasutatavate kaasprotsessori erandite käsitlemiseks.
80286 protsessor, mis asendas arhitektuuri järgmise etapi, ilmus alles 1982. aastal. Sellel oli juba 134 tuhat transistorit (1,5 mikroni tehnoloogia) ja kuni 16 MB füüsilist mälu. Selle fundamentaalne uuendus - kaitstud režiim ja kuni 1 GB suurune virtuaalmälu - ei leidnud massrakendust, protsessorit kasutati enamasti väga kiire 8088-na.
32-bitiste protsessorite klass avati 1985. aastal mudeliga 80386 (275 tuhat transistorit, 1,5 mikronit). Andmesiini (nagu ka siseregistrite) laius on jõudnud 23 bitini, adresseeritav füüsiline mälu on 4 GB. Ilmusid uued registrid, uued 32-bitised toimingud, kaitstud režiim paranes oluliselt, ilmus režiim V86, ilmus saalemälu haldus.
386 protsessori ajalugu meenutab 8086 ajalugu: esimene 32-bitise andmesiiniga mudel (hiljem nimega 386DX) asendati 16-bitise siiniga 386 SX-ga. See sobis üsna hõlpsalt PC AT arhitektuuriga, mis varem põhines 286 protsessoril.
Intel486DX protsessor ilmus 1989. aastal. Transistorid - 1,2 miljonit, 1 mikroni tehnoloogia. See erineb oluliselt 386-st esmase vahemälu ja kiibile sisseehitatud matemaatilise kaasprotsessori paigutuse poolest (varasematel protsessoritel oli võimalus kasutada väliseid x87 kaasprotsessoreid). Lisaks kasutab see CISC-protsessor (nagu ka järgnevad) jõudluse parandamiseks RISC-tuuma. Lisaks ilmusid selle sordid, mis erinevad kaasprotsessori olemasolu või puudumise, sisemise sageduse korrutamise, vahemälu kirjutamise poliitika ja muu poolest. Nad võtsid energiasäästu (ilmus SMM-režiim), mis kajastus ka 386 protsessorirea jätkamises (ilmus Intel386SL protsessor).
1993. aastal ilmusid esimesed Pentiumi protsessorid sagedusega 60 ja 66 MHz - 32-bitised protsessorid 64-bitise andmesiiniga. 3,1 miljonit transistorit, 0,8 mikroni tehnoloogia, toide 5 V. See erineb põhimõtteliselt 486. omast oma superskalaarse arhitektuuri poolest – võime vabastada torujuhtmetest ühe tsükli jooksul kuni kaks käsku (mis muidugi ei tähenda käskude läbimise võimalust läbi protsessori poole tsükliga või ühe tsükliga).
1994. aastal ilmunud Pentium protsessorid sagedusega 75, 90 ja 100 MHz tõid turule teise põlvkonna Pentium protsessoreid. Peaaegu sama arvu transistoridega valmistati need 0,6 mikroni tehnoloogiaga, mis võimaldas vähendada energiatarbimist. Need erinesid esimesest põlvkonnast sisemise sageduse korrutamise, mitme protsessori konfiguratsiooni toe poolest ja neil oli erinev korpuse tüüp. Mobiilirakenduste (sülearvutid) jaoks on olemas versioonid (miniatuurses paketis 75 MHz). Teise põlvkonna Pentium protsessorid on saanud personaalarvutites üsna populaarseks. 1995. aastal ilmusid 120 ja 133 MHz protsessorid, mis valmistati juba 0,35 mikroni tehnoloogial (esimesed 120 MHz protsessorid tehti samuti 0,6 mikroni tehnoloogiaga). 1996. aastat nimetatakse Pentiumi aastaks - protsessorid ilmusid sagedustel 150, 166 ja 200 MHz ning Pentiumist sai tavaline protsessor laialdaselt kasutatavate personaalarvutite jaoks.
Paralleelselt Pentiumiga arenes ka Pentium Pro protsessor, mida eristasid "dünaamilise käsu täitmise" uuendused. Lisaks pandi selle korpusesse ka sekundaarne vahemälu, mille maht oli 256 KB. Kuid 16-bitistes rakendustes ja ka Windows 95 keskkonnas ei anna selle kasutamine mingeid eeliseid. Protsessor sisaldab 5,5 miljonit tuumatransistorit ja 15,5 miljonit transistorit 256 KB sekundaarse vahemälu jaoks. Esimene protsessor sagedusega 150 MHz ilmus 1995. aasta alguses (0,6 mikroni tehnoloogia) ja juba aasta lõpus ilmusid protsessorid sagedusega 166, 180, 200 MHz (0,35 mikroni tehnoloogia), milles vahemälu ulatus 512 KB-ni.
1997. aasta alguses ilmusid Pentium MMX protsessorid. MMX laiendus eeldab operandide rühma paralleelset töötlemist ühe käsuga. MMX-tehnoloogia on loodud multimeediumirakenduste, eriti piltide ja signaalitöötluse toimingute kiirendamiseks. Lisaks MMX laiendusele on neil protsessoritel võrreldes tavalise Pentiumiga topelt suurem esmane vahemälu ja mõned Pentium Pr-lt laenatud arhitektuursed elemendid, mis suurendab Pentium MMX protsessori jõudlust tavapärastes rakendustes. Pentium MMX protsessoritel on 4,5 miljonit transistorit ja need on valmistatud -.35 mikroni tehnoloogiat kasutades. 1997. aasta juuni seisuga on saadaval 166, 200 ja 233 MHz protsessorid.
MMX-tehnoloogia ühendati Pentium Pro arhitektuuriga – ja mais 1997 ilmus Pentium II protsessor. See on Pentium Pro südamiku pisut vähendatud versioon, millel on suurem sisemine taktsagedus ja millele on lisatud MMX-i tugi. Teisese vahemälu protsessoriga samasse paketti paigutamise raskused saadi üle lihtsal viisil - väikesele trükkplaadile paigutati protsessori südamikuga kiip ja staatiliste mälukiipide komplekt ning sekundaarset vahemälu rakendavad lisaahelad. -kassett. Kõik kristallid on kaetud ühise spetsiaalse kattega ja neid jahutab spetsiaalne ventilaator. Tuumade taktsagedused on 233, 266 ja 300 MHz.
Vaatlusaluse perekonna protsessorites, alates 486.-st, kasutatakse kombineeritud arhitektuuri - CISC-protsessoril on RISC-tuum. mikroprotsessori teabe andmed
Inteli 80x86 perekond sai alguse 16-bitisest 8086 protsessorist. Kõik vanemad protsessorimudelid, sealhulgas 32-bitised (386., 486., Pentium, Pentium Pro) ja 64-bitise MMX-laiendiga, sisaldavad süsteemikäskude alamhulka ja allavoolu mudelid, tagades ühilduvuse varem kirjutatud tarkvaraga.
Tundub, et erinevused x86-64 arhitektuuri ja IA-32 vahel on isegi väiksemad kui IBM z/Architecture ja S/390 vahel. Peamised muudatused x86-64-s võrreldes IA-32 praeguse olekuga on vähesed ja need on teatud mõttes sarnased nendega, mis tehti üleminekul 16-bitiselt 32-bitiselt x86-arhitektuurile.
Need uuendused hõlmavad järgmist:
64-bitised virtuaalsed aadressid (konkreetse teostuse korral on võimalik väiksem bitisügavus);
· "tasane" (tasane) aadressiruum ühe koodide, andmete ja virnaga;
· 64-bitine programmiloendur (RIP);
· adresseerimisrežiim programmiloenduri suhtes;
· üldotstarbeliste registrite (täisarv) laiendamine kuni 64 bitti;
· 8 uue üldotstarbelise registri lisamine (R8-R15);
· 8 SSE-registri XMM8-XMM15 lisamine mahuga 128 (vastab Inteli pakutud SSE2 laiendusele).
Riis. 1. Üldotstarbeliste registrite laiendamine
Täiendavate registrite ja andmesuuruste "tähised" sisestatakse käskude eesliitena. Põhiliste x86-64 registrite komplekt on näidatud joonisel 1. Registrid on 64-bitised, välja arvatud 32-bitine EFLAGS-register, 128-bitised XMM-registrid ja 80-bitised ST-ujukomaregistrid. Arhitektuur x86-64 hõlmab eelkõige IA-32 SSE2 laiendusi, mis on kasutusele võetud koos Pentium 4-ga.
Registrit A adresseeritakse kui AX-i 16-bitiste toimingute jaoks, EAX-i 32-bitiste toimingute jaoks ja RAX-i 64-bitiste toimingute jaoks. 32-bitiste toimingute tegemisel, milles täisarvude register toimib tulemusregistrina, täidetakse 32-bitised väärtused nullidest 64-bitiste väärtusteni. 8-bitised ja 16-bitised toimingud täisarvuliste registrite puhul hoiavad ülemised bitid muutumatuna.
64-bitise adresseerimisega töötamiseks tutvustas x86-64 pikka režiimi (nimetagem seda "laiendatud režiimiks"). Töörežiimi määrab LMA (Long Mode Active) juhtbitt, mis seatakse siis, kui mikroprotsessor läheb laiendatud režiimi. Laiendatud režiimis eiratakse segmendiregistreid ES, DS, FS, GS, SS. CS register (koodisegmendi deskriptor) sisaldab bitte, mis määravad mikroprotsessori töörežiimid.
Mudelil x86-64 on laiendatud režiimil kaks "alamrežiimi": 64-bitine režiim ja ühilduvusrežiim. Ühilduvusrežiim tagab binaarse ühilduvuse 16-bitiste ja 32-bitiste x86 režiimidega. Alamrežiimi valikut juhib CS.L bitt. Kui see on seatud väärtusele 0 (ühilduvusrežiim), saab LMA-režiimis töötav 64-bitine operatsioonisüsteem käitada vanemaid 16-bitisi ja 32-bitisi x86-rakendusi. CS.D bitt vastutab operandi suuruse valimise eest.
Vaikimisi kasutatakse 64-bitises režiimis (LMA bit set, CS.L = 1, CS.D = 0) 64-bitiseid aadresse ja 32-bitisi operande. Käskude eesliidete abil saate muuta operandi suurust (selleks määrata 64 või 16 bitti), samuti aadressi suurust (määrata 32 bitti).
32-bitised rakendused saavad kasutada esimest 4 GB virtuaalmälu.
x86-64 arhitektuuriga mikroprotsessorite omaduste väljaselgitamiseks on vaja analüüsida EAX/EBX/ECX/EDX registreid, mis sisaldavad CPUID käsu täitmise tulemusi (kutsumisel panna EAX-i nagu varemgi 8000_0000h ). Kui EAX-i 29. bitt on 1, on mikroprotsessor laiendatud režiimis.
2. Ebatraditsiooniliste struktuuride mikroprotsessorid
2.1 Assotsiatiivsed protsessorid
Assotsiatiivne protsessor on spetsiaalne protsessor, mida rakendatakse assotsiatiivse salvestusseadme (AMU) baasil, kus, nagu teate, pääseb teabele juurde mitte operandi aadress, vaid operandis endas sisalduvad eristavad tunnused. Assotsiatiivne protsessor (AP) erineb traditsioonilisest kasutusest RAM-ist kahe omaduse poolest: andmetöötlustööriistade olemasolu ja võimalus paralleelselt kirjutada kõikidesse lahtritesse, mille jaoks on salvestatud assotsiatiivse funktsiooniga sobivus. AP viimast omadust tuntakse mitme salvestusena.
Sõnadega tehtavate toimingute sooritamise meetod võimaldab meil määratleda neli assotsiatiivsete protsessorite klassi:
paralleelne;
bitine järjestus;
sõna-sõnalt järjestikune;
plokikeskne.
Mitmebitise protsessori elemente kasutatakse paralleelse assotsiatiivse protsessori töötlemiselementidena. Iga PE töötab oma assotsiatiivse mälumooduli ja otsingutega, samuti m-bitiste sõnade aritmeetilise ja loogilise töötlemisega. Sisu järgi valitud sõnade ülekande AZU ja PE vahel tagavad lülitusahelad. Protsessori elemendid täidavad samaaegselt sama juhtprotsessorilt tulevat käsku. Lisaks on võimalik vahetada andmeid assotsiatiivmälu moodulite ja põhimälu vahel ning ligipääs selle kanali kaudu toimub nagu tavamälus - aadresside järgi.
Võrreldes teiste assotsiatiivsete protsessorite klassidega on paralleelsete AP-de jõudlus kõrgeim, kuid see saavutatakse suurte riistvarakulude arvelt.
2.2 Maatriksprotsessorid
Massiiviprotsessor koosneb suurest hulgast sarnastest protsessoritest, mis täidavad erinevate andmehulkade jaoks sama käsujada. Maailma esimene selline protsessor oli ILLIAC IV (Illinoisi ülikool). See on skemaatiliselt näidatud joonisel fig. 2.6. Algne idee oli konstrueerida masin, mis koosneb neljast kvadrandist, millest igaüks sisaldas 8 x 8 maatriksit protsessori/mäluplokkidest. Iga kvadrandi jaoks oli üks kontrollplokk. See saatis käske, mida täitsid kõik protsessorid üheaegselt, samas kui iga protsessor kasutas oma mälust pärinevaid andmeid (andmed laaditi lähtestamise ajal).
Seda lahendust, mis erineb oluliselt tavalisest von Neumanni masinast, nimetatakse mõnikord SIMD (Single Instruction-stream Multiple Data-stream) arhitektuuriks. Väga kõrge hinna tõttu ehitati vaid üks selline kvadrant, kuid see suutis sooritada 50 miljonit ujukomaoperatsiooni sekundis. Kui masin oleks ehitatud nelja kvadrandi abil, suudaks see sooritada 1 miljard ujukomaoperatsiooni sekundis ja sellise masina arvutusvõimsus oleks kaks korda suurem kui kogu maailma arvutitel.
Riis. 2. ILLIAC IV maatriksprotsessor
2.3 DNA protsessorid
DNA protsessorit iseloomustavad selle struktuur ja juhiste komplekt. Protsessori struktuur on DNA molekuli struktuur. Ja käskude komplekt on molekulidega tehtavate biokeemiliste toimingute loend. Arvuti DNA mälu põhimõte põhineb nelja nukleotiidi (DNA ahela peamised ehitusplokid) järjestikusel ühendamisel. Kolm nukleotiidi, mis ühenduvad suvalises järjestuses, moodustavad elementaarse mäluraku - koodoni, mille kogusumma moodustab seejärel DNA ahela. Peamine raskus DNA-arvutite väljatöötamisel on seotud selektiivsete ühekoodoni reaktsioonidega (interaktsioonidega) DNA ahelas. On olemas katseseadmed, mis võimaldavad töötada ühega 1020 koodonist või DNA molekulist. Teine probleem on DNA iseseisev kokkupanek, mis viib teabe kadumiseni. Sellest ületatakse spetsiaalsete inhibiitorite sisestamisega rakku – ained, mis takistavad iseenesliku ristsidumise keemilist reaktsiooni.
2 .4 Mobiilsideprotsessorid
Mõiste "neuroarvuti" tähendab praegu üsna laia klassi kalkulaatoreid. Formaalselt võib neuroarvutiks pidada mis tahes närvivõrgu algoritmi riistvaralist teostust, alates lihtsast bioloogilise neuroni mudelist kuni märgituvastussüsteemi või liikuvate sihtmärkideni. Neuroarvutid ei ole arvutid selle sõna tavapärases tähenduses. Praegu pole tehnoloogia veel saavutanud seda arengutaset, mille juures võiks rääkida üldotstarbelisest neuroarvutist (mis oleks ka tehisintellekt).
2.5 Sideprotsessorid
Sideprotsessorid on mikrokiibid, mis on jäikade ASIC-ide ja paindlike üldotstarbeliste protsessorite ristand.
Sideprotsessorid on programmeeritud, nagu meile tuttavad personaalarvutiprotsessorid, kuid ehitatud võrguülesandeid silmas pidades, optimeeritud võrgu tööks ja nende põhjal kirjutavad tootjad – nii protsessorid kui ka seadmed – tarkvara konkreetsete rakenduste jaoks.
Sideprotsessoril on oma mälu ja see on varustatud kiirete väliste kanalitega ühenduse loomiseks teiste protsessori sõlmedega. Kiire RISC-tuumaga sideprotsessor võimaldab hallata andmevahetust mitme sõltumatu kanali kaudu, toetab peaaegu kõiki levinud vahetusprotokolle, paindlikult ja tõhusalt jaotada ja töödelda jadaandmevooge ajajaotuskanalitega.
2.6 Andmebaasiprotsessorid
Andmebaasiprotsessoreid (masinaid) nimetatakse praegu riist- ja tarkvarasüsteemideks, mis on loodud täitma kõiki või mõningaid andmebaasihaldussüsteemide (DBMS) funktsioone. Kui omal ajal olid andmebaasihaldussüsteemid mõeldud peamiselt teksti- ja numbriteabe salvestamiseks, siis nüüd on need mõeldud väga erinevate andmevormingute jaoks, sealhulgas graafika, heli ja video jaoks. Andmebaasiprotsessorid täidavad haldus- ja levitamisfunktsioone, pakuvad teabele kaugjuurdepääsu lüüside kaudu ja kopeerivad värskendatud andmeid erinevate replikatsioonimehhanismide abil.
Kaasaegsed andmebaasiprotsessorid peavad pakkuma andmebaasidesse kogutud teabe loomulikku ühendust online-tehingute töötlemise tööriistade ja Interneti-rakendustega. Need peaksid olema süsteemid, mis võimaldavad kasutajatel ettevõtte andmetele igal ajal juurde pääseda ja neid analüüsida, olenemata nende andmete asukohast.
Selliste probleemide lahendamine nõuab selliste süsteemide jõudluse olulist suurendamist. Kaasaegse DBMS-i paljude funktsioonide traditsiooniline tarkvaraline rakendamine üldotstarbelistes arvutites viib aga tülikate ja ebaproduktiivsete süsteemideni, mille töökindlus ei ole piisavalt kõrge. Tuleb otsida uusi arhitektuurseid ja riistvaralisi lahendusi. Praegu selles valdkonnas tehtavad intensiivsed uuringud on viinud arusaamiseni vajadusest kasutada andmebaasiprotsessoridena spetsiaalseid paralleelarvutussüsteeme. Selliste süsteemide loomine on seotud paralleelsuse rakendamisega toimingute ja tehingute jada teostamisel, samuti konveierandmete voogesituse töötlemisel.
2.7 Vooprotsessorid
Vooprotsessoreid nimetatakse protsessoriteks, mis põhinevad paljude andmete töötlemise põhimõttel ühe käsuga. Flynni klassifikatsiooni järgi kuuluvad need SIMD (single instruction stream / multiple data stream) arhitektuuri. SIMD-tehnoloogia võimaldab teha sama toimingut, nagu lahutamine ja liitmine, mitmel arvul korraga. Vooprotsessor parandab üldist jõudlust, mis on eriti oluline 3D-graafikaga töötamisel. Võib olla üks voogedastusprotsessor (Single-streaming processor – SSP) ja mitme lõimega protsessor (Multi-Streaming Processor – MSP).
Vooprotsessorite silmapaistev esindaja on Inteli protsessorite perekond, alustades Pentium III-st, mis põhineb Streaming SIMD Extensions (SSE) tehnoloogial. SIMD klassi esindajateks loetakse protsessorite maatriksit: ILLIAC IV, ICL DAP, Goodyear Aerospace MPP, Connection Machine 1 jne. Sellistes süsteemides juhib üks kontroller mitut protsessori elementi. Iga protsessori element saab igal kindlal ajahetkel juhtseadmelt sama käsu ja täidab selle oma kohalikel andmetel.
2.8 Multitegumtöötluse (häguse) loogikaga protsessorid
Hägusloogikaga (fuzzy logic) protsessor põhineb udumatemaatikal.
Hägusloogika ei lahenda neid probleeme, mida binaarloogika alusel lahendada ei saa, kuid paljudel juhtudel on see mugavam, produktiivsem ja odavam. Selle põhjal välja töötatud spetsiaalsed riistvaralahendused (hägusad kalkulaatorid) annavad jõudluses tõelisi eeliseid. Kui me kaskaadime hägused kalkulaatorid, saame ühe võimaluse neuroprotsessori või närvivõrgu jaoks. Paljudel juhtudel on need mõisted lihtsalt ühendatud, nimetades üldmõistet "neuro-fuzzy logic".
2.9 Signaaliprotsessorid
DSP568xx perekond põhineb 16-bitisel fikseeritud punktiga DSP56800 protsessori tuumal. See tuum on loodud juhtimise ja digitaalse signaalitöötluse probleemide tõhusaks lahendamiseks. Selle juhiste komplekt pakub digitaalset signaalitöötlust parimate üldotstarbeliste DSP-de jõudlusega ja vastab vajadusele kompaktsete juhtimisprogrammide hõlpsa loomise järele.
DSP56800 tuum on programmeeritav 16-bitine CMOS-protsessor, mis on loodud reaalajas digitaalsete signaalide töötlemiseks ja andmetöötluseks. DSP56800 tuum (joonis 26) koosneb neljast funktsionaalsest üksusest: programmi juhtimine, aadressi genereerimine, aritmeetika-loogiline andmetöötlus, bititöötlus. Jõudluse suurendamiseks tehakse seadmetes toiminguid paralleelselt. Igal seadmel on oma registrite komplekt ja juhtimisloogika ning see on korraldatud nii, et see suudab töötada iseseisvalt ja samaaegselt ülejäänud kolmega. Sisemised aadressi- ja andmesiinid ühendavad omavahel mälu, funktsionaal- ja välisseadmed (välisseadmete registrid asuvad mälualal). Seega rakendab kernel mitme toimingu samaaegset täitmist: juhtseade valib esimese käsu, aadressigeneraator genereerib teise käsu kuni kaks aadressi ja ALU teostab kolmanda käsu korrutamise. On olemas alternatiivne võimalus: kolmandas käsus saab toimingut teha mitte ALU, vaid bitiprotsessor. Torujuhtme arhitektuur võimaldab realiseerida mikrokiibis sisalduvate seadmete paralleelset tööd ja oluliselt vähendada programmi täitmise aega.
3. Multiprotsessorsüsteemid
3.1 Üldnõuded mikroprotsessorsüsteemile
Erinevate arvutite omavaheliseks võrdlemiseks kasutatakse tavaliselt standardseid jõudluse mõõtmise meetodeid. Need metoodikad võimaldavad arendajatel ja kasutajatel kasutada lahenduste hindamiseks testiskoore ning lõppkokkuvõttes on jõudlus ja maksumus need, mis annavad kasutajale ratsionaalse aluse otsustada, millist arvutit valida.
Arvutussüsteemide kõige olulisem omadus on töökindlus. Töökindluse parandamine põhineb talitlushäirete vältimise põhimõttel, vähendades tõrgete ja rikete määra kõrge ja ülikõrge integratsiooniastmega elektroonikaskeemide ja komponentide kasutamise kaudu, vähendades häirete taset, ahelate kergemaid töörežiime, nende töö termiliste režiimide tagamine, samuti seadmete kokkupaneku meetodite täiustamine.
Skaleerimine on võime suurendada protsessorite arvu ja võimsust, RAM-i ja välismälu hulka ning muid arvutussüsteemi ressursse. Skaleerimise peavad tagama arvuti arhitektuur ja disain, samuti sobivad tarkvaratööriistad.
Tarkvara ühilduvus ja kaasaskantavus. Tarkvara ühilduvuse kontseptsiooni võtsid esmakordselt laialdaselt kasutusele IBM/360 süsteemi arendajad. Selle süsteemi kogu mudelivaliku kavandamisel oli peamiseks ülesandeks luua arhitektuur, mis oleks kasutaja seisukohalt ühesugune kõikide süsteemi mudelite jaoks, sõltumata nende igaühe hinnast ja jõudlusest. Selle lähenemisviisi tohutuid eeliseid, mis võimaldab teil uutele (tavaliselt produktiivsematele) mudelitele üleminekul hoida olemasolevat tarkvara mahajäämust, hindasid kiiresti nii arvutitootjad kui ka kasutajad ning sellest ajast alates on peaaegu kõik arvutiseadmete tarnijad selle kasutusele võtnud. neid põhimõtteid. , pakkudes seeriat ühilduvaid arvuteid. Tuleb aga märkida, et aja jooksul ka kõige arenenum arhitektuur paratamatult vananeb ning arvutussüsteemide arhitektuuris ja korraldamise viisides on vaja teha radikaalseid muudatusi.
3.2 Paralleelsete andmetöötlussüsteemide klassifikatsioon
Paralleeltöötlussüsteemide jaoks on neli peamist arhitektuuritüüpi:
Torujuhtmete ja vektorite töötlemine. Konveieri töötlemise aluseks on mõne toimingu eraldi täitmine mitmes etapis (mitme etapi kohta) koos andmete edastamisega ühest etapist teise. Sel juhul suureneb tootlikkus tänu sellele, et konveieri erinevatel etappidel tehakse korraga mitu toimingut.
Konveier on efektiivne ainult siis, kui konveier on täiskoormusele lähedal ja uute operandide etteandekiirus ühtib konveieri maksimaalse läbilaskevõimega. Kui ilmneb latentsusaeg, tehakse paralleelselt vähem toiminguid ja üldine jõudlus väheneb. Vektoroperatsioonid annavad ideaalse võimaluse arvutuskonveieri täielikuks laadimiseks.
SIMD tüüpi süsteemid. SIMD tüüpi masinad koosnevad suurest hulgast identsetest protsessorielementidest, millel on oma mälu. Sellise masina kõik protsessori elemendid käivitavad sama programmi. Ilmselgelt suudab selline masin, mis koosneb suurest hulgast protsessoritest, pakkuda väga kõrget jõudlust ainult nende ülesannete puhul, mille puhul kõik protsessorid saavad teha sama tööd. SIMD-masina arvutusmudel on väga sarnane vektorprotsessori omaga: suure andmeplokiga tehakse üks toiming.
MIMD tüüpi süsteemid. Mõiste "mitmeprotsessor" hõlmab enamikku MIMD-masinaid ja (sarnaselt sellele, kuidas terminit "maatriksprotsessor" kasutatakse SIMD-seadmete puhul) kasutatakse sageli MIMD-masinate sünonüümina. Mitmeprotsessorilises süsteemis täidab iga protsessori element (PE) oma programmi üsna sõltumatult teistest protsessori elementidest.
Multiprotsessorsüsteemid SIMD protsessoritega. Paljud kaasaegsed superarvutid on multiprotsessorsüsteemid, mis kasutavad protsessoritena vektorprotsessoreid või SIMD tüüpi protsessoreid. Sellised süsteemid kuuluvad MSIMD-klassi masinate hulka.
3.3 Sidemudelid ja mäluarhitektuurid
Igal andmevahetusmehhanismil on oma eelised. Ühismälus jagamiseks hõlmab see järgmist:
Ühilduvus hästi mõistetavate mehhanismidega, mida kasutatakse nii üheprotsessorilistes kui ka väikesemahulistes mitmeprotsessorilistes süsteemides, mis kasutavad vahetamiseks ühismälu
Lihtne programmeerida, kui protsessorite vahelised suhtlusmustrid on keerulised või muutuvad käitusajal dünaamiliselt. Sellised eelised muudavad kompilaatori loomise lihtsamaks.
Väiksem vahetuse latentsus ja parem ribalaiuse kasutamine väikeste andmeosade vahetamisel
Võimalus kasutada riistvaraga juhitavat vahemällu kaugsuhtluse sageduse vähendamiseks, võimaldades vahemällu salvestada kõik andmed, nii jagatud kui ka mittejagatud.
Sõnumi edastamise abil vahetamise peamised eelised on järgmised:
Riistvara võib olla lihtsam, eriti kui võrrelda jagatud mälu mudeliga, mis toetab skaleeritavat vahemälu sidusust.
Vahetusmudelid on arusaadavad, sundides programmeerijaid (või kompilaatoreid) pöörama tähelepanu vahetusele, mis on tavaliselt seotud kõrgete kuludega.
Mis tahes vahetusmehhanismi hindamisel on kriitilised kolm jõudlust:
1. Ribalaius: ideaaljuhul piiravad vahetusmehhanismi ribalaiust protsessori, mälu ja ühendussüsteemi ribalaiused, mitte vahetusmehhanismi ükski aspekt. Vahetusmehhanismiga seotud üldkulud (näiteks protsessoritevahelise side pikkus) mõjutavad otseselt ribalaiust.
2. Latentsus: Ideaalis peaks latentsusaeg olema võimalikult väike. Selle kindlaksmääramiseks on vahetuse algatamise ja lõpetamisega seotud riist- ja tarkvara üldkulud kriitilised.
3. Viivituse peitmine: kui hästi peidab mehhanism viivitust kattudes vahetuse arvutustega või muude vahetustega.
Kõik need jõudlusparameetrid mõjutavad börsi omadusi. Eelkõige võivad viivitus ja ribalaius olenevalt üksuse suurusest erineda. Üldiselt on mehhanism, mis töötab ühtviisi hästi nii väikese kui ka suure andmemahu korral, paindlikum ja tõhusam.
3.4 Jagatud mäluga mitmeprotsessorilised süsteemid
Nii kirjutamise tühistamisega skeemi kui ka värskendusega kirjutamise skeemi rakendamise võti mitme protsessoriga süsteemides, kus on vähe protsessoreid, on siinimehhanismi kasutamine nende toimingute tegemiseks. Värskendamise või tühistamise toimingu tegemiseks võtab protsessor lihtsalt siini kinni ja tõlgib selle üle aadressi, millel andmeid tuleks värskendada või neist loobuda.
Kõik protsessorid jälgivad pidevalt siini, jälgides sellel kuvatavaid aadresse. Protsessorid kontrollivad, kas siinile ilmunud aadress on nende vahemälus. Kui jah, siis vastavad andmed vahemälus kas tühistatakse või uuendatakse, olenevalt kasutatavast protokollist. Siinile omane järjestikuse juurdepääsu järjekord tagab ka selle, et kirjutamistoimingud on rangelt järjestikused, sest kui kaks protsessorit võistlevad samasse asukohta kirjutamise pärast, peab üks neist pääsema siinile enne teist.
Järelevalveprotsessi rakendamiseks saab kasutada tavalisi vahemälumärgendeid. Lisaks muudab eelnevalt mainitud kehtiv bitt tühistamise lihtsaks. Ka lugemise vahelejäämistest, olgu põhjuseks kehtetuks tunnistamine või mõni muu sündmus, pole samuti raske aru saada, kuna need põhinevad lihtsalt vaatlusvõimalusel. Kirjutamistoimingute puhul soovime ka teada, kas plokist on ka muid vahemällu salvestatud koopiaid, sest kui selliseid koopiaid pole, ei saa kirjutamist siinile saata, mis vähendab kirjutamise lõpetamise aega, samuti vajalik ribalaius.
3.5 Kohaliku mäluga mitmeprotsessorilised süsteemid
Suuremahuliste hajutatud (kohalike) mälusüsteemide loomiseks on kaks erinevat viisi. Lihtsaim viis on kõrvaldada riistvaramehhanismid, mis tagavad vahemälu sidususe ja keskenduda skaleeritava mälusüsteemi loomisele.
Sidususprobleemide lahendamiseks ei salvestata jagatud (jagatud) andmeid vahemällu. Muidugi võib tarkvara rakendada jagatud andmete jaoks mingit vahemällu salvestamise skeemi, kopeerides need jagatud aadressiruumist konkreetse sõlme kohalikku mällu. Sel juhul kontrollib mälu sidusust ka tarkvara. Selle lähenemise eeliseks on see, et nõutav riistvaratugi on praktiliselt minimaalne, kuigi näiteks selliste funktsioonide olemasolu nagu andmete plokk- (rühma)kopeerimine oleks väga kasulik. Sellise organisatsiooni puuduseks on see, et kompilaatori poolt seda tüüpi vahemälu sidususe tarkvara toetamise mehhanismid on väga piiratud. Praegune tehnika sobib peamiselt hästi struktureeritud paralleelsusega programmide jaoks programmitsükli tasemel.
4. Mikroprotsessorsüsteemide vahetusviisid
Peamised vahetusrežiimid on tarkvaraga juhitav vahetus, katkestusrežiimi vahetus ja otsemälu juurdepääsu vahetus.
Programmiga juhitav vahetus toimub töödeldud käsu initsiatiivil ja hõlmab teabe lugemist OP-st mikroprotsessorile, teabe kirjutamist MP-st OP-sse, teabe sisestamist sõidukiüksusest MP-sse ja teabe väljastamist MP-st sõidukiüksus. Mõelge loetletud vahetustüüpidele.
Info lugemine põhimälust mikroprotsessorisse algab hetkest, kui väljastatakse OP-lahtri aadressi väärtus, kust MP-st SHA-sse infot lugeda. Vastavalt MP-lt SHU-le tulevale sünkroniseeriva impulsi "lugemisele" (RD) aktiveeritakse OP soovitud rakud. Teave OP-st siseneb SD-sse, edastatakse MP-le ja kirjutatakse MP vastavasse registrisse.
Teabe kirjutamine MP-st põhimällu algab samamoodi nagu esimesel juhul: MP-st SHA-sse võetakse vastu selle OP-lahtri aadressi väärtus, kuhu salvestus tuleks teha, ja MP genereerib. kirjutamissignaal (WR) SHU liinil. Samal ajal siseneb MP-st teave SD-le, edastatakse OP-sse ja kirjutatakse vastavasse mälulahtrisse.
Teabe sisestamine MP-sse välisseadmest algab juhtseadme või MP sünkroniseerimissignaaliga, kuid konkreetse KVV kanali aadressiga, mis on ühendatud vajaliku sõidukiüksusega ja mille kaudu toimub teabe sisestamine (lugemine) MP tekib saadetakse SHA-le. Sellist kanalit nimetatakse pordiks. Mõne aja pärast liinil SHU MP genereerib juhtsignaali RD "lugemine" (või "sisend"). Määratud aadressil küsitud port aktiveeritakse ja RD-signaali korral jõuab teave sõidukiüksusest pordi kaudu samm-mootorisse. Selle kohaselt edastatakse info parlamendisaadikule.
Teabe väljastamine MP-st välisseadmesse toimub MP moodustamisega KVV kanali (pordi) aadressi ridadele SHA, mis on ühendatud vajaliku sõidukiüksusega. Teatud aja möödudes genereerib MP WR-liinil WR-i "rekord" (või "väljund") signaali ja väljastab SD-le teabe, mis tuleb kirjutada (väljund) vajalikku sõidukiüksusesse. Määratud aadressil nõutav väljundport aktiveeritakse ja teave SD-lt jõuab määratud sõidukiüksusesse.
Vahetuse katkestamine. Katkestusrežiimis olev vahetus on ette nähtud sõidukiüksuse poolt genereeritud katkestustaotluste teenuseprogrammide töötlemiseks nende poolt töötamise ajal teabe kogumise protsessis. Sõidukiüksuse genereeritud katkestamistaotluste ajastus on juhuslik nähtus ja enamikul juhtudel ei saa seda programmeerida.
Katkestusrežiimis vahetuse algatab seda sõidukiüksust teenindav sõidukiüksus või KVV ja see toimub täpselt nendel ajahetkedel, mil vastav sõidukiüksus on MP-le andmete edastamiseks valmis. Niipea, kui see on andmete edastamiseks valmis, genereerib seda sõidukiüksust teenindav katkestuskontroller katkestusnõude signaali, mida MP analüüsib ja vajadusel katkestab töödeldava programmi ning jätkab vahetustoiminguga - katkestusteenuse sisestus ja töötlemine. programm.
Seal on riistvara, tarkvara ja spetsiaalsed katkestused.
Riistvarakatkestused, mida praktikas nimetatakse ka välisteks katkestusteks, tekivad sõidukiüksuse genereeritud signaalide kokkupuutel, mis vajavad teenindust. Riistvarakatkestusi kasutatakse reeglina sõidukiüksuse teenindamiseks nende seadmete nõudmisel. Need võivad olla mittemaskeeritavad ja maskeeritavad.
Mittemaskeeritavad katkestused on katkestused, mille käivitab väline riistvara ja mida käivitatav programm ei saa keelata. Selliste katkestuste taotlused saadetakse mikroprotsessori spetsiaalsesse sisendisse - mittemaskeeritavate katkestuste sisendisse. Neid teenindatakse tõrgeteta ja kohe, olenemata hetkel käivitatava programmi tähtsusest.
Maskeeritavad katkestused – katkestused, mida saab tarkvaraga lubada või keelata – lisades programmi spetsiaalsed juhised, mis lubavad või keelavad katkestused antud programmi jaotises. Selliste katkestuste rakendamiseks on mikroprotsessoril üks või mitu maskeeritavat katkestusteenuse päringu sisendit.
Vahetage otsemälu juurdepääsu režiimis. Varem käsitletud režiimides toimub teabevahetus MP ja OP või MP ja sõidukiüksuse vahel. Praktikas on aga sageli vaja kiiret teabevahetust sõidukiüksuse ja operatsioonisüsteemi vahel ilma seda töötlemata. Sel juhul peab vahetusprotseduur eelnevalt kirjeldatud režiimide kasutamisel sisaldama kahte tsüklit. Esimeses tsüklis tuleb info esmalt VU-st (või OP-st) MP akumulaatorisse üle kanda, teises tsüklis tuleb teave akumulaatorist sisestada OP-sse (või VU-sse).
Aeglase toimega sõidukiüksustega vahetamisel ja suurte teabekoguste edastamisel vähendab selline kaheetapiline protseduur oluliselt vahetuskurssi, st viib MPS-i kui terviku jõudluse vähenemiseni. Sellega seoses kasutatakse vahetusmeetodit, mille puhul teave kirjutatakse OP-sse sõidukiüksusest või loetakse teave mälust välisseadmesse otse ilma MP osaluseta. Seda tüüpi vahetust nimetatakse otsemälu juurdepääsu (DMA) vahetamiseks.
Vahetuse korraldamiseks kasutatakse spetsiaalset juhtseadet - PDP-kontrollerit, mis vahetuse ajal täidab aktiivse seadme funktsioone, st määrab OP lahtri aadressi või osaleva sõidukiüksuse pordi aadressi. SH-liinide vahetus, genereerib SH-liinidel vajalikud juhtsignaalid, määrab SD-liinide kaudu teabeedastuse alguse.
Programmiga juhitava vahetuse ja katkestusrežiimis vahetamise korral haldab MP siini (aadressi-, andme- ja juhtsiinid). DMA režiimis vahetades tuleb pagasiruumi anda DMA kontrolleri käsutusse ja MP siinidest lahti ühendada. Selleks annab MP spetsiaalse juhtsignaali "rehvi püüdmise taotlus" sisendi, mille vastuvõtmisel pärast jooksva käsutäitmistsükli lõppu lülitab MP juhtseade oma rehvide puhverseadmed režiimile kõrge väljundtakistus (kõrge impedantsi olek). Samal ajal ühendatakse MP magistraalidest lahti ja selle juhtseade spetsiaalsel juhtliinil genereerib PDP-kontrollerile siini hõivamise loa signaali ja annab magistraalseadme käsutusse kas ühe sõna või terve teabe massiivi edastamiseks. .
5. Infoedastuskanalid mikroprotsessorsüsteemides
Liidese ahelad on jagatud mitmeks tasemeks:
1. taseme siiniliidesed pakuvad teabevahetust mikroprotsessorsüsteemi kõigi (või põhi) moodulite vahel. Enamiku selle taseme siinide valiku määrab mikroprotsessori arhitektuur, näiteks I-41 (Multibus) liidest kasutatakse K580, K1810 seeria MPC-de jaoks, moodulitevahelist paralleelliidest (IPI) - K1801/ 1809, K1811, K581, K5S8 seeria MPC-d jne.
S-100 siini loodi 8-bitiste mikroprotsessorite ja erinevate tööstuslike rakenduste jaoks.
Selle tüüpilised omadused olid järgmised:
Mõõdud: 134mm x 254mm, 100 tihvti
Ühendus: 50 tihvti plaadi mõlemal küljel
Reguleerimata toitepinge: +8V, +16V.
ISA siini. i80286 mikroprotsessorit kasutavates PC AT arvutites hakati esmakordselt kasutama uut ISA (Industry Standard Architecture) süsteemisiini, realiseerides täielikult mainitud mikroprotsessori võimalused. Aadressiliinide arvu on suurendatud nelja võrra ja andmeliinide arvu kaheksa võrra. Seega oli võimalik paralleelselt edastada 16 bitti andmeid ja tänu 24 aadressireale pääseda otse ligi 16 MB süsteemimälule. Selle siini riistvarakatkestusliinide arvu on suurendatud 7-lt 15-le ja DMA-kanalite arvu 4-lt 7-le.
EISA siin pakub suuremat võimalikku adresseeritavat mälumahtu, 32-bitist andmeedastust, sh DMA-režiimis, täiustatud katkestussüsteemi ja DMA arbitraaži, süsteemi ja laienduskaartide automaatset seadistamist.
Nubusi siinil on ligikaudu samad omadused kui ISA-l.
Multibus-II siini arendati 1985. aastal tööstusautomaatikas laialdaselt kasutatava Multibusi standardi edasiarendusena. Multibus-II on 32-bitine siin ja suudab töötada juhtprotsessori kiirusel – kuni 80 MB/s läbilaskevõimega. Erinevalt teistest siin käsitletud siinidest on Multibusil võimalus kiireks sõnumivahetuseks erinevate juhtseadmete vahel. Samal ajal võimaldab edastusmehhanism korraldada protsessorite ja kontrollerite vahelist "intelligentset" suhtlust. See on eriti oluline mitme protsessoriga süsteemide loomisel ja keerukate tööstuselektroonika komplekside ehitamisel.
MC-siin (MicroChannel) ilmus 1987. aastal PS/2 arvutites. Piisavalt kiire (kuni 20 MHz, kuni 76 MB/s) ja laia (32 bitti) siini sisaldas mitmeid edukaid arhitektuurseid lahendusi ning võis kergesti konkureerida süsteemisiinide seas liidrikoha pärast.
Sellel on järgmised funktsioonid:
16.8.32 - bitiandmeliinid,
Katkestused signaali taseme järgi (erinevalt ISA-st, kus katkestused on kellasignaali servas),
24 või 32 aadressirida (aadressil kuni 4 GB mälu),
Plaatide automaatne konfigureerimine (nende plaatide ROM-is oleva teabe põhjal),
Asünkroonne andmeedastusprotokoll.
Sbus töötati välja 1989. aastal töötamiseks kuni 25 MHz. See on mõeldud 32-bitiste andmete edastamiseks. Selle funktsiooniks on võime virtuaalsed aadressid automaatselt tõlkida füüsilisteks, tuvastada andmeedastuse vead ja algatada korduskatseid.
Mbus loodi 1990. aastal ja on mõeldud 64-bitiste andmete edastamiseks. Mbus ühildub teiste siinidega, sellel on kaasaskantavad valikud ja see sisaldab sõnumsidevõimalusi.
SCSI siini (Small Computer System Interface) reguleerib standard IEC 9316, mis ühendab põhitasemed välisseadmete põhitüüpidele, peamiselt magnetketastele, ADC-dele, samuti funktsioonide laiendamise võimaluse spetsiaalsete koodide ja väljade kaudu. . Liides kasutab kõigi andmeplokkide loogilist adresseerimist ja võimalust lugeda otsejuurdepääsuseadmetest teavet saadaolevate plokkide arvu kohta.
PCI siinil on tavalise VL-Busi ees mitmeid eeliseid. Siiniga saab ühendada kuni 10 seadet vastavalt PCI spetsifikatsioonile. See aga ei tähenda sama arvu laienduspesade kasutamist – piirang kehtib komponentide koguarvule, sealhulgas ka emaplaadil asuvatele. Kuna iga PCI laienduskaarti saab jagada kahe välisseadme vahel, väheneb paigaldatud pesade koguarv.
Multipleksitud aadressi- ja andmeliinidega MPI-liides on loodud süsteemiseadmete informatiivse ja elektrilise ühilduvuse tagamiseks. Seda rakendatakse igas sellega ühendatud seadmes sisalduva selgroo ja loogiliste sõlmede põhjal. Seadmed koos moodustavad selgroo ühe aadressiruumi.
Unibusi liides sisaldab 56 signaaliliinist koosnevat selgroogu. Kõik seadmed on nende liinidega paralleelselt ühendatud. Prioriteetsiini juhtimiseks kasutatakse viit simplekssignaali liini, ülejäänud 51 liini on dupleks; Ülemseade kasutab 18 aadressirida, et valida, millise alluvaga suhelda. Üks aadressiridadest määrab baidi, millele baitidega tehtavate toimingute ajal juurde pääseb; 16 andmeliini kasutatakse teabe edastamiseks ülema ja alam vahel. Kaks juhtjoont määratlevad ühe neljast võimalikust vahetusoperatsioonist (kaks sisendrežiimi ja kaks väljundrežiimi).
I-41 liides on üks Multibus liidese variantidest, mis ühendab standardiseeritud liidesed IEEE, VME - siin, AMS - siin jne, säilitades samas liinide koostise ja nende funktsioonid.
Layer 2 liidesed pakuvad välisseadmete ja sideseadmete kombinatsiooni objektidega (USO), mida kasutatakse juhtudel, kui sõidukiüksusel ja OCO-l ei ole sisseehitatud süsteemiliidest ning neid ei saa otse süsteemi magistraalsüsteemiga ühendada. Siin on enim kasutusel IRPS-liides seadmete radiaalseks ühendamiseks info jadaedastusega ja IRPR-liides seadmete ühendamiseks paralleelse teabeedastusega. Nende abiga ühendatakse peaaegu kõik välisseadmed (kuvarid, printerid, klaviatuurid, plotterid jne), välja arvatud välised salvestusseadmed, mis seavad liidese ribalaiusele kõrgemaid nõudmisi.
3. kihi liidesed on mõeldud andurite ja täiturmehhanismide ühendamiseks. Senine andurite ja täiturmehhanismide lai valik on viinud suure hulga nende liideste väljatöötamiseni. Liidesed
4 taset on andmeedastusseadmete (DDU) liidesed. Nende hulka kuuluvad liidesed telegraafi, telefoni, kõrgsageduslike, fiiberoptiliste ja muude kanalite jaoks andmeedastuseks pikkade vahemaade jaoks. See hõlmab ka üld- ja eriotstarbeliste hajutatud juhtimissüsteemide liideseid (KAMAK IEC - 640, IEC - 625 - 1 jada, ILPS - 2 jne) ja üldotstarbelisi kohtvõrgu liideseid (R - 802 jne)
5. kihi liidesed hõlmavad mikroprotsessorisüsteemi väliseid liideseid. Väline liides ühendatakse süsteemiliidesega spetsiaalse liideseadapteri abil.
AGP liides mõeldud teabe väljastamiseks välisseadmetesse, sealhulgas andmete kuvamiseks. See sisaldab siini ja teabeedastusseadet (videokiirendit), mis moodustavad liideseahela. Praegu on enim kasutatav AGP liides.
6. Individuaalne ülesanne
Intel Pentium T2130
Intel Pentium T2130 on kahetuumaline mikroprotsessor, Dual-Core T2xx sarja uusim liige, mis ilmus 2007. aasta aprillis.
Iseärasused:
2 oja
Täiustatud SpeedStep tehnoloogia
Käivitage Disable Bit
Toetage MMX, SSE, SSE2, SSE3
Intel® virtualiseerimistehnoloogia (VT-x)
Protsessori pesa - pesa M
Arhitektuur:
Intel Pentium Dual-Core T2130, mis põhineb täiustatud Pentium M-il.
151 miljonit transistorit
Protsessori südamiku suurus - 90 mm?
Protsessori tuum - Yonah
Omadused:
Mikroprotsessoril Intel Pentium Dual-Core T2130 on 2 tuuma sagedusega 1,86 GHz.
Süsteemi siini sagedus - 533 MHz
1. taseme vahemälu – 2 x 32 KB juhised 2 x 32 KB andmevahemälu
2. taseme vahemälu – 1 MB
Maksimaalne võimsus 31 W.
Tööpinge 1 - 1,3 V
Eelised:
Sellel on suhteliselt madal hind.
Täiustatud Intel SpeedStep tehnoloogia.
Tagab arvutite kõrge tootlikkuse.
Madal energiatarve
multitegumtöö
Puudused:
Piiratud vahemälu suurus.
Ei toeta ECC-mälu (riistvara veaparandusmälu).
Ei toeta Turbo Boost, Hyper Threading tehnoloogiaid
Ei toeta 64-bitist andmetöötlust
Kirjandus
1. http://www.osp.ru/os/2002/04/181300/
2. https://ru.wikipedia.org/wiki/X86-64
3. http://www.nsc.ru/win/elbib/data/show_page.dhtml?77+852
4. http://www.island-formoza.ru/arhitektura-pc/parallelizm-na-urovne-processorov.html
5. http://libeldoc.bsuir.by/bitstream/123456789/989/81.pdf
6. http://mrmarker.ru/p/page.php?id=14738
Majutatud saidil Allbest.ru
...Sarnased dokumendid
Andmebaasi teooria (DB) definitsioonid. Infosüsteemide rakenduse elemendid. Relatsiooniandmemudelid. Hajutatud andmebaasihaldussüsteemide ülesanne. Taotluste paralleelse töötlemise vahendid. Andmebaasi kasutamine inventuuri jaoks.
kursusetöö, lisatud 01.05.2015
Andmeedastussüsteemide mõiste ja klassifikatsioon. Juhtmeta andmeedastussüsteemide omadused. Juhtmega andmeedastussüsteemide omadused: fiiberoptilised ja fiiberoptilised koaksiaalsüsteemid, keerdpaar, juhtmed. Seadmete tootjate hindamine.
kursusetöö, lisatud 03.04.2010
Mikroprotsessori üldine struktuur. 64-bitise mälu alamsüsteemi struktuur. I/O pordi valik. Mikroprotsessorsüsteemide liidese omadused. Itanium 2 baasil mälu alamsüsteemi projekteerimine. Infosisu ja vajalike mahtude arvutamine.
kursusetöö, lisatud 05.12.2012
Mikroprotsessor kui universaalne seade teabe tarkvaraliseks töötlemiseks. Funktsionaalsus ja arhitektuursed lahendused. Mikrokontrollerid juhtimis- ja infotöötlussüsteemides. Elektrooniliste arvutite klassifikatsioon.
kursusetöö, lisatud 12.10.2015
Arvutussüsteemide arhitektuuride klassifikatsioonid. Arvutisüsteemide organiseerimine. CPU seade. Kaasaegsete arvutite arendamise põhimõtted. Mikroprotsessorsüsteemide areng. Funktsionaalsete üksuste arvu ja koostise suurenemine.
lõputöö, lisatud 29.01.2009
Kaasaegsed andmetöötlussüsteemid. Automatiseeritud infosüsteem. Info mõiste ja dünaamiline mudel. Paljude erinevat tüüpi süsteemide tekkimine, mis erinevad ehituspõhimõtete ja neisse põimitud infotöötlusreeglite poolest.
esitlus, lisatud 14.10.2013
Arvutisüsteemi põhikomponendid. Arengulugu, mikroprotsessorite kasutamise tunnused. D-päästiku seade ja töö. Mikroprotsessorite skemaatiline diagramm, direktiivid, operaatorid ja programmide kirjeldus, silurite tüübid.
koolitusjuhend, lisatud 27.11.2011
Majandusinfo töötlemise süsteemide nõuded ja struktuur. Infotöötlustehnoloogia ja süsteemide hooldus, infokaitse. Päringute, vormide, aruannete, makrode ja moodulite loomise protsess. Tööriistad andmebaaside korrastamiseks ja nendega töötamiseks.
kursusetöö, lisatud 25.04.2012
Arvutusseadmete ajalooline areng. Arvutussüsteemide plokkskeemid. Elementide baasi arendamine ja süsteemide endi arhitektuuri arendamine. Arvutite põhiklassid. Andmekanalid. Nõuded välisseadmete koostisele.
abstraktne, lisatud 01.09.2011
Esitatud teabe vormid. Kasutatava andmemudeli peamised tüübid. Infoprotsesside tasandid. Infootsing ja andmete otsing. Võrgusalvestus. Andmeladude arendamise ja hooldamise probleemid. Andmetöötlustehnoloogiad.
Liides on tarkvara- ja riistvarakomplekt, mis on loodud teabe edastamiseks arvutikomponentide vahel ja sisaldab elektroonilisi lülitusi, liine, siine ja aadressisignaale, andmeid ja juhtimist, signaaliedastusalgoritme ja reegleid signaalide tõlgendamiseks seadmete poolt.
Laiemas plaanis hõlmab liides ka mehaanilist osa (ühilduvus standardpistikute järgi) ja abiahelaid, mis tagavad seadmete elektrilise ühilduvuse loogikasignaali tasemete, sisend- ja väljundvoolude jms osas.
Liideste ja süsteemisiinide üksikasjalik uurimine ei kuulu selle kursuse raamesse. Seetõttu käsitleme neid küsimusi ainult töökorralduse üldise idee seisukohalt. mikroprotsessori süsteem ja selle koostisosade koostoime põhimõtted.
Peamine viis MPS-i korraldamiseks on pagasiruumi modulaarne (joonis 8.1): kõik seadmed, sealhulgas mikroprotsessor, on kujutatud moodulitena, mis on omavahel ühendatud ühise kiirteega. Infovahetus pagasiruumis vastab mõne seda tüüpi pagasiruumi jaoks loodud ühise liidese nõuetele. Iga moodul on siiniga ühendatud spetsiaalsete liideseahelate kaudu.
Riis. 8.1.
Moodulite liideseahelatele on määratud järgmised ülesanded:
- signaalide funktsionaalse ja elektrilise ühilduvuse tagamine ning vahetusprotokollid moodulid ja süsteemi kiirtee;
- mooduli sisemise andmevormingu teisendamine süsteemi magistraalsüsteemi andmevormingusse ja vastupidi;
- ühtsete infovahetuskäskude tajumise ja sisejuhtimissignaalide jadaks muutmise tagamine.
Need liideseahelad võivad olla üsna keerulised. Tavaliselt rakendatakse neid spetsiaalse mikroprotsessori LSI kujul. Selliseid skeeme nimetatakse kontrollerid.
Kontrollerid neil on suur autonoomia, mis võimaldab ajas paralleelselt töötada välisseadmed ja andmetöötlusprogrammi täitmine mikroprotsessori poolt.
Lisaks pakuvad kontrollerid andmete eelpuhverdamise teel paljude järjestikustel aadressidel asuvate sõnade korraga edastamist, mis võimaldab kasutada nn plahvatusohtlikku ainet.
( Burst ) siinirežiim – 1 aadressitsükkel, millele järgneb mitu andmetsüklit.
Põhimooduli arvutikorralduse miinuseks on enam kui kahe mooduli samaaegse interaktsiooni võimatus, mis seab piirangud esitus arvuti.
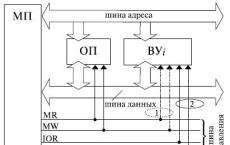
Mikroprotsessori koostoime muutmälu (RAM) ja välisseadmetega (VU) on kujutatud joonisel fig. 8.2.

Riis. 8.2.
Mikroprotsessor genereerib välise seadme või RAM-i elemendi aadressi ja genereerib juhtsignaale - kas IOR / IOW kui seda kasutatakse välisest seadmest lugemiseks/kirjutamiseks või MR/MW mälust lugemiseks/kirjutamiseks.
MP-s on ainult 2 käsku teabe vahetamiseks välisseadmetega:
- sisendkäsk IN AX , DX kirjutab AX-i registrisse numbri välisest seadmest, mille aadress on DX registris; samal ajal genereeritakse IOR-signaal (INput / OUTput Read ).);
- väljundkäsk OUT DX , AX väljastab informatsiooni AX-registrist välisseadmesse, mille aadress on DX-registris; see genereerib signaali IOW (INput / OUTput Write).
IOR/IOW signaalid genereeritakse ainult nende käskude täitmisel.
MR / MW signaalide moodustamine toimub käskudes, mille operandi ja/või tulemuse vastuvõtja asub RAM-is, näiteks ADD , AX .
Sellega seoses on aadressiruumi korraldamiseks kaks peamist viisi mikroprotsessori süsteem:
- Koos ühine aadressiruum välisseadmed ja RAM;
- sõltumatute aadressiruumidega.
Esimesel juhul pääseb I / O portidele juurde RAM-i rakkudena. Selle lähenemisviisi eeliseks on võimalus kasutada välisseadmetele juurdepääsul erinevaid adresseerimisrežiime, samuti teostada I / O portide sisuga erinevaid aritmeetilisi ja loogilisi toiminguid. Kuid samal ajal vähendab see adresseeritud RAM-i mahtu ja vähendab süsteemi turvalisust, kuna see kaotab I / O-käskude täitmisega seotud täiendavad kaitsed (lipuregistri IOPL-i väli ei tööta). Lisaks võib programmi loogika rikkumine (vale RAM-aadressi moodustamine) kaasa tuua välise seadme vale töö.
Kui esimene puudus pole tänapäevaste mahtude juures nii märkimisväärne salvestusseadmed, siis võib teine MPS-i tööd väga negatiivselt mõjutada. Võimalus kasutada keerulisi adresseerimisrežiime universaalsetel MP-del põhinevate mikroprotsessorsüsteemide välisseadmetele juurdepääsul ei ole nii oluline. Seetõttu eelistatakse praegu MPS-i koostamisel teist lähenemisviisi.
Mõelge mikroprotsessori ja välisseadmete vahelise teabevahetuse funktsioonidele. Selle protsessi lihtsustatud ajastusskeem on näidatud joonisel