Scopul sistemelor cu microprocesoare. Introducere: microprocesoare, sisteme cu microprocesoare Compoziția unui sistem cu microprocesoare
Dintre numeroasele și diversele domenii de aplicare ale microprocesoarelor (MP) și microcalculatoarelor, unul dintre primele locuri în ceea ce privește volumul și utilizarea este ocupat de sistemele cu microprocesoare - sisteme de calcul orientate pe obiecte, de exemplu, pentru control, diagnosticare, procesare digitală a semnalului si imagini.
În sistemele cu microprocesoare, o proprietate atât de importantă a microprocesoarelor ca încorporare– capacitatea de a aduce tehnologia informatică mai aproape de obiectul de măsurare, control, prelucrare a informațiilor sau diagnosticare.
Principalele sarcini care pot fi rezolvate cu ajutorul sistemelor cu microprocesoare sunt următoarele:
– controlul unui proces tehnologic complex sau al unui obiect tehnic conform unor algoritmi specificați;
– procesarea semnalului digital direct la locația sursei semnalului;
– prelucrarea imaginii – filtrare, clarificare, conturare, scalare etc. în sistemele tehnice de viziune în roboții industriali, în sistemele radar, în sistemele de supraveghere, navigație etc.
– adaptarea sistemelor automate de măsurare, control, prognoză la condițiile în schimbare;
– crearea de sisteme flexibile de control reglabil, semnal digital și procesare a imaginii;
– acumularea și prelucrarea prealabilă a informațiilor;
- crearea de dispozitive multifuncționale, extinderea capabilităților dispozitivelor existente;
– crearea de dispozitive și sisteme „inteligente”, creșterea nivelului de inteligență al dispozitivelor și dispozitivelor existente;
– implementarea autodiagnosticelor și testării echipamentelor.
Posibilitatea implementării acestor funcții în sistemele cu microprocesoare, împreună cu realizările electronicii și comunicațiilor, dezvoltarea metodelor matematice de prelucrare a semnalului în măsurători și dezvoltarea unui software adecvat, a creat premisele necesare pentru apariția unor noi generații de sisteme cu microprocesoare. și echipamente cu următoarele capacități:
- automatizarea completă a tuturor tipurilor de prelucrare a informațiilor, integrarea și coordonarea tuturor funcțiilor asigurate de sistem;
- creșterea compoziției sistemului și extinderea funcțiilor acestuia datorită structurii trunchi-modulare de construcție și dezvoltare de software;
– o varietate de algoritmi și metode de măsurare;
- descentralizarea sarcinilor îndeplinite de caracteristici funcționale, organizatorice și teritoriale, disponibilitatea instrumentelor de inteligență artificială, posibilitatea de învățare a sistemului, adaptarea și optimizarea acestuia;
– fiabilitate ridicată și fiabilitate funcțională datorită instrumentelor de autodiagnosticare și testare, precum și flexibilității managementului sistemului;
– posibilitatea de interfață cu alte sisteme de calcul.
Implementarea practică a sarcinilor de mai sus necesită o soluție cuprinzătoare a problemelor științifice, tehnice și tehnologice legate de crearea și dezvoltarea de hardware și software, metode de modelare matematică a proceselor complexe și a obiectelor tehnice, analog-digital și digital-to- convertoare analogice (DAC), interfață LSI și alte componente electronice, cu utilizarea mijloacelor moderne de comunicare și, în final, cu pregătirea personalului capabil să rezolve cu competență sarcinile stabilite.
Principii de construcție a sistemelor MP.
Miezul oricărui sistem cu microprocesor este un microprocesor sau pur și simplu un procesor (din engleză procesor). Cel mai corect este să traduceți acest cuvânt în rusă ca „procesor”, deoarece microprocesorul este nodul, blocul care realizează toată prelucrarea informațiilor în cadrul sistemului de microprocesor.
microprocesor vom numi un dispozitiv controlat de program conceput pentru a procesa informații digitale și a genera semnale care controlează această procesare.
Nodurile rămase îndeplinesc doar funcții auxiliare: stocarea informațiilor (inclusiv informații de control, adică programe), comunicarea cu dispozitive externe, comunicarea cu utilizatorul etc. Procesorul înlocuiește practic toată „logica dură” care ar fi necesară într-un sistem digital tradițional. Îndeplinește funcții aritmetice (adunare, înmulțire etc.), funcții logice (deplasare, comparare, mascare de cod etc.), stocare temporară a codurilor (în registre interne), transfer de coduri între nodurile sistemului de microprocesor și multe altele. Numărul de astfel de operațiuni elementare efectuate de procesor poate ajunge la câteva sute. Procesorul poate fi comparat cu creierul sistemului. Dar, în același timp, trebuie avut în vedere faptul că procesorul își realizează toate operațiunile rand pe rand, adică unul după altul, pe rând. Desigur, există procesoare Cu executarea paralelă a unor operații, există și sisteme cu microprocesoare în care mai multe procesoare lucrează la aceeași sarcină în paralel, dar acestea sunt rare excepții. Pe de o parte, execuția secvențială a operațiilor este un avantaj incontestabil, deoarece permite utilizarea unui singur procesor pentru a executa oricare, cei mai complexi algoritmi de procesare a informațiilor. Dar, pe de altă parte, execuția secvențială a operațiilor duce la faptul că timpul de execuție a algoritmului depinde de complexitatea acestuia. Algoritmii simpli rulează mai repede decât cei complecși. Adică, un sistem cu microprocesor este capabil să facă totul, dar nu funcționează prea repede, deoarece toate fluxurile de informații trebuie să fie trecute printr-un singur nod - un microprocesor (Fig. 1.3). Într-un sistem digital tradițional, este ușor să organizați procesarea paralelă a tuturor fluxurilor de informații, cu prețul complicarii circuitului.
administrator
informație
(program)
Orez. 1.3. Fluxurile de informații într-un sistem cu microprocesor.
Deci, microprocesorul este capabil să efectueze multe operațiuni. Dar de unde știe ce operație trebuie să efectueze în acest moment? Aceasta este ceea ce este determinat informații de control, program.
Un program este un set de comenzi (instrucțiuni) adică coduri digitale, descifrarea pe care, procesorul va ști ce trebuie să facă. Programul de la început până la sfârșit este compilat de o persoană, un programator, iar procesorul acționează ca un executant ascultător al acestui program, nu arată nicio inițiativă (cu excepția cazului în care, desigur, este în stare bună). Prin urmare, compararea procesorului cu creierul nu este foarte corectă. El este doar un executor al algoritmului pe care o persoană l-a compilat pentru el în avans. Orice abatere de la acest algoritm poate fi cauzată doar de o defecțiune a procesorului sau a altor componente ale sistemului cu microprocesor.
Toate instrucțiunile executate de procesor formează sistemul procesorului de comandă. Structura și volumul setului de instrucțiuni procesor determină viteza, flexibilitatea și ușurința în utilizare. În total, procesorul poate avea de la câteva zeci până la câteva sute de comenzi. Sistemul de instrucțiuni poate fi proiectat pentru o gamă restrânsă de sarcini de rezolvat (pentru procesoare specializate) sau pentru cea mai largă gamă posibilă de sarcini (pentru procesoare de uz general). Codurile de comandă pot avea un număr diferit de cifre (ocupă de la unul la mai mulți octeți). Fiecare comandă are propriul său timp de execuție, astfel încât timpul de execuție al întregului program depinde nu numai de numărul de comenzi din program, ci și de ce comenzi sunt utilizate.
Pentru a executa instrucțiuni, structura procesorului include registre interne, o unitate logică aritmetică (ALU, ALU - Arithmetic Logic Unit), multiplexoare, buffere, registre și alte noduri. Funcționarea tuturor nodurilor este sincronizată de un semnal de ceas extern comun al procesorului. Adică procesorul este un dispozitiv digital destul de complex (Fig. 1.4).
Orez. 1.4. Un exemplu de structura celui mai simplu procesor.
Cu toate acestea, pentru dezvoltatorul de sisteme cu microprocesoare, informațiile despre complexitățile structurii interne a procesorului nu sunt foarte importante. Dezvoltatorul trebuie să considere procesorul ca pe o „cutie neagră”, care, ca răspuns la codurile de intrare și control, efectuează una sau alta operație și produce semnale de ieșire.
Dezvoltatorul trebuie să cunoască sistemul de comandă, modurile de operare a procesorului, precum și regulile de interacțiune a procesorului cu lumea exterioară sau, așa cum sunt numite și protocoale de schimb de informații .
Despre structura internă a procesorului, trebuie să știți doar ce este necesar pentru a selecta o anumită instrucțiune, un anumit mod de operare.
Sistem cu microprocesor - acesta este un sistem de calcul, control și măsurare sau control în care principalul dispozitiv de procesare a informațiilor este MP. Sistemul cu microprocesor este construit dintr-un set de microprocesoare LSI.
Construcția sistemelor MPS se bazează pe trei principii: coloana vertebrală; modularitatea; controlul microprogramelor.
Principiul trunchiului determină natura conexiunilor dintre blocurile funcționale ale MPS - toate blocurile sunt conectate la o singură magistrală de sistem.
Principiul modularității este că sistemul este construit pe baza unui număr limitat de tipuri de module finalizate structural și funcțional. Fiecare modul al sistemului MPS are o a treia intrare de control a stării (de înaltă impedanță). Această intrare este numită СS (Сhір Select) - alegerea cristalului sau OE (Ieșire Enabie) - permisiunea de ieșire.
Acțiunea semnalului CS pentru declanșare este prezentată în fig. 1.5. Semnal de declanșare inițial Q va apărea pe ieșire numai când este activ (înîn acest caz - zero) nivelul semnalului CS. Dacă CS = 1, flip-flop-ul este plasat într-o stare de înaltă impedanță. Ieșirea de declanșare este tri-stabilă, adică poate fi într-una din cele trei stări: unu logic, zero logic sau impedanță ridicată. În fiecare moment, la magistrala sistemului MPS sunt conectate doar două module - cel care primește și cel care transmite informații. Altele sunt într-o stare de impedanță ridicată.
Principiile vertebratei și modularității fac posibilă creșterea capacităților de control și de calcul ale MP prin adăugarea altor module.
Principiul de control al firmware-ului consta in posibilitatea efectuarii de operatii elementare - microinstructiuni (schimbare, transfer de informatii, operatii logice). Cu o anumită combinație de microinstrucțiuni, puteți crea un set de comenzi care vor îndeplini cel mai bine scopul sistemului, adică să creați un limbaj tehnologic.
Luați în considerare o diagramă bloc generalizată a MPS (Fig. 1.6.) MPS include: unitatea centrală de procesare (CPU), PZP, OZP; sistem de întrerupere, temporizator, UVV. Dispozitivele I/O sunt conectate la magistrala de sistem prin interfețe I/O.
Memoria numai în citire și memoria cu acces aleatoriu formează un sistem de memorie conceput pentru a stoca informații sub formă de numere binare. Memoria doar citire este concepută pentru a stoca programe, tabele, constante.
Memoria cu acces aleatoriu - pentru stocarea rezultatelor intermediare ale calculelor. Memoria este organizată ca o matrice de celule, fiecare având propria sa adresă și conține un octet sau un cuvânt.
Modulul CPU procesează datele și gestionează toate celelalte module din sistem. Procesorul central, pe lângă LSI MP, conține circuite de sincronizare și o interfață cu magistrala de sistem. Preia codurile de comandă din memorie, le decriptează și le execută. În timpul executării unei instrucțiuni - un ciclu de instrucțiuni - CPU efectuează următoarele acțiuni:
Setează adresa instrucțiunii pe magistrala de adrese AB;
Preia codul de comandă din memorie și îl decriptează;
Calculează adresele operanzilor și citește datele;
Efectuează operația specificată de comandă;
Acceptă semnale de control extern (de exemplu, cerere de întrerupere);
Generează semnalele de stare și control necesare pentru funcționarea memoriei
și UVV.
Dispozitivele I/O sau dispozitivele externe sunt dispozitive concepute pentru a introduce informații în MP sau pentru a scoate informații din acesta. Exemple de ICD-uri sunt afișajele, imprimantele, tastaturile, convertoarele digital-analogic și analog-digital, releele și comutatoarele. Pentru a conecta aparatele cu aer la magistrala de sistem, semnalele acestora trebuie să îndeplinească anumite standarde. Acest lucru se realizează folosind interfețe I/O.
Interfețele de intrare-ieșire îndeplinesc funcția de a potrivi semnalele de explozie de aer cu semnalele magistralei sistemului MP. Se mai numesc și controlere sau adaptoare. Microprocesorul accesează interfețele folosind comenzi speciale I/O. În același timp, parlamentarul pune adrese în autobuz AB adresa interfeței și pe magistrala de date DB citește date de pe un dispozitiv de intrare sau scrie pe un dispozitiv de ieșire. Pe fig. 1.6 arată o interfață de intrare și o interfață de ieșire.
Sistemul de întrerupere permite MPS să răspundă la semnale externe - solicitări de întrerupere, ale căror surse pot fi: semnale de pregătire de la dispozitive externe, semnale de la generatoare, semnale de la ieșirile senzorilor. Când apare o solicitare de întrerupere, CPU întrerupe programul principal și continuă să execute rutina de serviciu de solicitare de întrerupere. Pentru a construi un sistem de întrerupere, MPC-urile conțin LSI ale controlerelor speciale de întrerupere programabile.
Cronometrul este conceput pentru a implementa funcții legate de sincronizare. După ce MP încarcă în cronometru un număr care specifică frecvența, întârzierea sau factorul de divizare, temporizatorul implementează singur funcția dorită.
Pregătit de Serghei
Colegiul Pedagogic Profesional de Stat Magnitogorsk
Magnitogorsk, 2005
1. Structura logică a sistemului cu microprocesor
La proiectarea sistemelor de monitorizare, control sau de calcul bazate pe un microprocesor, este necesar să se afle și să descrie funcțiile care trebuie îndeplinite în sistem, iar apoi să le coordoneze cu capacitățile acelor microprocesoare care pot fi utilizate în sistemul proiectat.
Un sistem electronic real bazat pe un microprocesor conține un număr semnificativ de dispozitive funcționale, dintre care unul este un microprocesor. Toate dispozitivele de sistem au o interfață standard și sunt conectate la o singură autostradă a informațiilor, așa cum se arată în Fig.1.
Microprocesorul, în funcție de cerințele sistemului, poate fi un dispozitiv cu un singur cip sau cu o singură placă, creat pe baza unui set multicip de microprocesor LSI. În sistemele de înaltă performanță, microprocesorul este construit pe baza secțiunilor de microprocesor bipolar ale LSI.
Microprocesorul îndeplinește funcțiile unei unități centrale de control și a unui dispozitiv aritmetic-logic de conversie a datelor în sistem. Ca dispozitiv de control, generează secvențe de ceas și semnale logice care determină secvența de funcționare a tuturor dispozitivelor logice din sistem. Microprocesorul setează și efectuează secvențial micro-operații pentru extragerea comenzilor programului din memoria sistemului, decodificarea și executarea acestora. Tipul de funcționare a microprocesorului este determinat de codul de operare din instrucțiune. În conformitate cu aceste coduri, microprocesorul efectuează operații aritmetice, logice sau de altă natură asupra numerelor reprezentate în BCD binar sau codificat.
Numerele care suferă transformări operaționale în unitatea logică aritmetică a microprocesorului se numesc operanzi. Operandul poate fi unul dintre numerele originale, un rezultat, o constantă sau un parametru. O operație într-un microprocesor este efectuată pe unul sau doi operanzi.
Memoria unui sistem cu microprocesor este implementată fizic pe baza diferitelor memorii. Fezabilitatea tehnică și economică duce la construirea unei memorie ierarhice bazată pe dispozitive semiconductoare de memorie cu acces permanent și aleatoriu și dispozitive de stocare externă magnetică.
Fig.1 Structura logică a sistemului cu microprocesor
Dispozitivele de memorie Semiconductor Read-only ROM permit citirea numai a datelor pre-înregistrate în timpul funcționării sistemului. Au o viteză mare de funcționare și sunt nevolatile, adică. păstrați informațiile atunci când alimentarea este oprită.
Dispozitivele de memorie cu acces aleator semiconductori RAM funcționează în moduri operaționale (coincide cu ritmul microprocesorului) de scriere și citire a datelor. Dezavantajul RAM este volatilitatea lor, adică. pierderea informațiilor înregistrate atunci când alimentarea este oprită.
Memoria de sistem este adresabilă, adică fiecare cuvânt este înregistrat într-o celulă de memorie cu adresa sa unică. Un cuvânt este un set de unități binare (biți) - cifre binare interpretate ca un număr separat sau mai multe grupuri semantice de cifre binare. Pentru a obține un număr din memorie sau pentru a scrie un număr în memorie, trebuie să specificați cu precizie adresa acestuia în memorie și să efectuați operația de citire a datelor din memorie.
Dispozitive de introducere a datelor (IDV) - orice mijloc conceput pentru a transfera date din exterior către registre sau memorie microprocesor (tastatură din panoul de control, intrare de pe benzi perforate și carduri perforate, dispozitive de stocare externe pe benzi magnetice, casete, discuri, afișaje etc.) .
Dispozitive de ieșire a datelor (UVvyv) - orice mijloc capabil să primească date transmise din registrele microprocesorului sau celulele de memorie (afișaje, dispozitive de imprimare, dispozitive de stocare externe, panou de control etc.).
Pentru a conecta o varietate de dispozitive de intrare sau de ieșire a datelor (precum și dispozitive combinate de intrare-ieșire), este necesar să aduceți toate conexiunile și semnalele acestora într-o formă standard, de ex. pentru a coordona interfețele. Pentru aceasta, se folosește o unitate hardware specială - un controler de informații IC, care are o interfață standard pe partea de conectare la autostrada informațională și o interfață non-standard pe partea dispozitivelor de intrare-ieșire, de exemplu. care este un convertor de interfețe de interfață.
Microprocesorul MP, RAM și ROM, împreună cu UVvyv, conceput pentru operațiuni cu o persoană sau alt sistem electronic, se numește microcomputer. Un micro-calculator este un computer, a cărui parte centrală, ca parte a unui procesor, RAM, ROM și controler de informații, este construită pe baza unui LSI. Utilizarea LSI ca principale componente elementare oferă microcalculatoarelor astfel de avantaje față de alte tipuri de computere, cum ar fi compactitatea, fiabilitatea, consumul redus de material, consumul redus de energie și costul. Dar structura principală a microcomputerului și limitele de viteză ale microprocesorului determină caracteristicile de performanță moderate ale microcomputerului. Se referă la microcalculatoare bazate pe microprocesoare pe unul sau mai multe cipuri. Într-un microcalculator bazat pe secțiuni de microprocesor bipolar, este posibil să se obțină performanțe ridicate datorită implementării procesării pipelinei de date și controlului de mare viteză, foarte eficient, al procesului de calcul, chiar și cu o structură de bază.
Microcalculatorul devine partea centrală a sistemului electronic de control, management și calcul atunci când este introdus în bucla de control a unui obiect (proces). Pentru a interfața cu un micro-calculator, un obiect (proces) trebuie să fie echipat cu senzori de stare și actuatoare. Senzorii acționează ca surse de intrare a informațiilor în microcalculator, iar actuatorii acționează ca receptori ai informațiilor de ieșire. Pentru coordonarea interfețelor, conectarea senzorilor și actuatoarelor în sistem se realizează prin unități de interfață ale senzorilor și actuatorilor.
În funcție de caracteristicile obiectului (procesului) și de capacitățile microprocesorului, complexitatea fiecărui dispozitiv sau bloc este stabilită în faza de proiectare. Părți ale sistemului pot evolua sau degenera, dar trebuie asigurat principiul general de construcție și funcționare a tuturor sistemelor electronice de control. Datorită relației directe dintre funcțiile software și hardware, este posibil să se dezvolte fie hardware, fie software complicat la construirea unui sistem electronic. Aceste circumstanțe determină posibilitățile în masă de utilizare a sistemelor de control cu microprocesor în aproape toate domeniile.
Structura logică a controlerului programabil universal.
Controlerul (unitatea locală de control) este necesar să controleze dispozitivele de intrare-ieșire a informațiilor (ABV). Oferă interfața electromecanică și logică a canalului de informații al computerului și părților ABB, care sunt surse sau receptori de informații și date de control, stabilește secvența, cantitatea, parametrii electrici, poziția în timp și direcția fluxului de informații între informații. canale și ABB. Sarcina principală a controlerului este de a oferi condiții pentru deblocarea și blocarea supapelor individuale sau a grupurilor acestora, precum și de a porni diferite tipuri de motoare electrice, întrerupătoare electromecanice, excita solenoizi, primi semnale amplificate și formate de la senzorii de informații ABB.
Cu orice opțiuni pentru împărțirea funcțională a sistemului în părți, hardware-ul unității de interfață cu ABB este fie integrat cu LSI al microprocesorului, fie este realizat separat sub forma unei interfețe (interfață) LSI.
Controlerul poate fi implementat ca o conexiune rigidă între grupuri de porți, flip-flops etc. ca o mașină digitală bazată pe logica hardware. Minimizarea numărului de componente electronice pentru pachetele de circuite integrate are ca rezultat, de obicei, o structură electronică dezordonată, specializată pentru o utilizare specifică numai într-un anumit dispozitiv. O modificare a diagramei de sincronizare sau introducerea de noi semnale în controlerul hardware implică necesitatea reproiectării și reproiectării întregului controler sau a unei părți din acesta.
Controlerele programabile universale sunt implementate ca LSI cu un singur cip sau bazate pe secțiuni de seturi de microprocesoare LSI. În astfel de controlere, diverse diagrame de timp ale semnalelor și secvențele lor sunt generate nu de distribuirea semnalelor obișnuite ale generatorului de ceas prin conexiuni prin cablu, ci de conversia secvențelor de comenzi (microinstrucțiuni). Datorită flexibilității software-ului și firmware-ului, adaptarea unui controler programabil la o anumită zonă de aplicare se realizează prin reprogramare, care nu afectează implementarea hardware a controlerului sau provoacă doar suprascrierea conținutului memoriei de control. dispozitive.
Parametrii tehnici și economici ai circuitelor integrate cu un grad ridicat de integrare a elementelor fac posibilă controlul informațiilor ABB ale unui calculator prin intermediul unor structuri electronice similare structurilor calculatoarelor de control. Aceasta oferă: 1) flexibilitate funcțională prin utilizarea sistemelor de comandă avansate și construcția de diverse secvențe complexe de semnale pe baza acestora, cu capacitatea de a lua în considerare răspunsul sistemului la semnalele de ieșire; 2) utilizarea metodelor de control distribuit în sistemele de control ierarhic, atunci când optimizarea procesului de conversie a informațiilor se realizează la nivelul superior de control, iar controlul local direct este efectuat de controlerul încorporat, care percepe și interpretează atât starea ABB și semnalele de control ale mijloacelor unui nivel de control superior; 3) ușurința de specializare și modificare a dispozitivului de control ABB.
Trimiteți-vă munca bună în baza de cunoștințe este simplu. Foloseste formularul de mai jos
Studenții, studenții absolvenți, tinerii oameni de știință care folosesc baza de cunoștințe în studiile și munca lor vă vor fi foarte recunoscători.
Găzduit la http://www.allbest.ru/
Ministerul Educației și Științei al Ucrainei
Universitatea Națională Tehnică din Ucraina
„Institutul Politehnic din Kiev”
Departamentul de Matematică Aplicată
Microprocesoare și sisteme cu microprocesoare
Efectuat:
Chetverik Valeria Yaroslavovna
Grupa: KM-12
Verificat de: Kopychko S.N.
- Introducere
- 1. Evolutia microprocesoarelor
- 2.1 Procesoare asociative
- 2.2 Procesoare Matrix
- 2.3 Procesoare ADN
- 2.4 Procesoare celulare
- 2.6 Procesoare de baze de date
- 2.7 Procesoare de flux
- 2.9 Procesoare de semnal
- 3. Sisteme multiprocesor
- 3.4 Sisteme cu microprocesoare cu memorie partajată
- 3.5 Sistem cu microprocesor cu memorie locală
- 6. Sarcina individuală
- Literatură
1. Evolutia microprocesoarelor
Istoria procesoarelor a început în 1979, când Intel a lansat primul microprocesor i4004. Avea o lățime de date de 4 biți, capacitatea de a adresa 640 de octeți de memorie, o viteză de ceas de 108 kHz și o performanță de 0,06 MIPS. Un astfel de procesor ar putea funcționa deja ca un nucleu de calcul al unui calculator. Acesta conținea 2300 de tranzistori și a fost realizat folosind o tehnologie cu o rezoluție de 10 microni. Un an mai târziu, a apărut „ruda” sa de 8 biți - i8008, adresându-se deja 16 KB de memorie.
În 1974, a apărut procesorul i8080 pe 8 biți și a devenit un dispozitiv foarte popular. Avea deja o frecvență de 2 MHz și se adresa 64 KB de memorie. 6000 de tranzistori au făcut posibilă găzduirea tehnologiei de fabricație de 6 microni. Procesorul necesita trei surse de alimentare (+5V, +12V și -5V) și sincronizare complexă cu doi pini. Pe acest procesor au fost construite o varietate de terminale, controlere și chiar și primul PC Altair. La noi, ecoul tardiv al lui 8086 au fost procesoarele 580IK80 și KR580VM80, pe baza cărora au fost construite multe PC-uri „de casă” la începutul și mijlocul anilor ’80.
Următorul pas a fost procesorul i8085 (5 MHz, 0,37 MIPS, 6500 tranzistori, tehnologie de 3 microni). A păstrat populara arhitectură de registru 8080 și compatibilitatea cu software-ul, dar a adăugat un port de interfață serială, a eliminat circuitele integrate de suport dedicate (generator de ceas și controler de sistem) și a schimbat ușor interfața externă. Principalul cadou pentru dezvoltatorii echipamentului a fost o tensiune de alimentare + 5V.
O variație a temei 8080 și 8085 este procesorul Z80 de la Zilog. În timp ce se menține compatibilitatea software-ului cu 8080, au fost introduse registre suplimentare în acesta, ceea ce a făcut posibilă îmbunătățirea semnificativă a performanței. Rezultatul a fost impresionant - până de curând, popularele computere Sinclair construite pe Z80 au demonstrat grafică în jocuri care nu erau inferioare PC-urilor pe un procesor 286 pe 16 biți.
Primul procesor 8086 pe 16 biți a fost lansat de Intel în 1978. Frecvența este de 5 MHz, performanța este de 0,33 MIPS, dar instrucțiunile sunt deja cu operanzi de 16 biți (ulterior au apărut procesoare de 8 și 10 MHz). Tehnologie de 3 microni, 29 de mii de tranzistori. Memorie adresabilă 1 MB. Arhitectura registrului și sistemul de instrucțiuni diferă semnificativ de 8080, dar ideile generale sunt urmărite în mod natural. Un an mai târziu, a apărut 8088 - același procesor, dar cu o magistrală de date pe 8 biți. A început istoria PC-ului IBM, care și-a pus amprenta asupra dezvoltării ulterioare a acestei linii de procesoare Intel. Distribuția în masă și deschiderea arhitecturii PC-ului a insuflat o avalanșă de software dezvoltat de firme mari, mijlocii și mici și entuziaști singuri. Cea tehnică a necesitat (și necesită în continuare) dezvoltarea procesoarelor, dar încărcarea de software pentru PC care trebuie să ruleze pe procesoare mai noi a necesitat și compatibilitate cu software-ul înapoi. Astfel, toate inovațiile în arhitectura procesoarelor ulterioare au trebuit să fie atașate nucleului existent. Și apoi este arhitectura PC-ului în sine, „aruncată”, de exemplu, complexitatea utilizării vectorului de întrerupere. Intel a rezervat primii 32 de vectori „pentru uz oficial”, dar aceștia au fost „pasați” de întreruperile BIOS-ului computerului. Unul dintre rezultate este o modalitate suplimentară de a gestiona excepțiile de coprocesor utilizate în computerele mai vechi.
Procesorul 80286, care înlocuiește următoarea etapă a arhitecturii, a apărut abia în 1982. Avea deja 134 de mii de tranzistori (tehnologie de 1,5 microni) și se adresa până la 16 MB de memorie fizică. Inovația sa fundamentală - modul protejat și memoria virtuală de până la 1 GB - nu a găsit aplicații în masă, procesorul a fost folosit în mare parte ca un 8088 foarte rapid.
Clasa de procesoare pe 32 de biți a fost deschisă în 1985 cu modelul 80386 (275 de mii de tranzistori, 1,5 microni). Lățimea magistralei de date (precum și a registrelor interne) a ajuns la 23 de biți, memoria fizică adresabilă este de 4 GB. Au apărut registre noi, operațiuni noi pe 32 de biți, modul protejat a fost îmbunătățit semnificativ, a apărut modul V86, a apărut gestionarea memoriei de paginare.
Istoria procesorului 386 seamănă cu istoria lui 8086: primul model cu o magistrală de date pe 32 de biți (numit mai târziu 386DX) a fost înlocuit cu 386 SX cu o magistrală de 16 biți. Se potrivește destul de ușor în arhitectura PC AT, bazată anterior pe procesorul 286.
Procesorul Intel486DX a apărut în 1989. Tranzistoare - 1,2 milioane, tehnologie de 1 micron. Diferă semnificativ de 386 în plasarea cache-ului primar și a coprocesorului matematic încorporat pe cip (procesoarele anterioare aveau capacitatea de a folosi coprocesoare externe x87). În plus, pentru a îmbunătăți performanța, acest procesor CISC (precum și cele ulterioare) folosește un nucleu RISC. În plus, au apărut varietățile sale, care diferă prin prezența sau absența unui coprocesor, utilizarea înmulțirii frecvenței interne, politica de scriere în cache și altele. Au preluat economisirea energiei (a apărut modul SMM), ceea ce s-a reflectat și în continuarea liniei de procesoare 386 (a apărut procesorul Intel386SL).
În 1993 au apărut primele procesoare Pentium cu o frecvență de 60 și 66 MHz - procesoare pe 32 de biți cu magistrală de date pe 64 de biți. 3,1 milioane de tranzistori, tehnologie de 0,8 microni, alimentare de 5 V. Diferă fundamental de 486-a prin arhitectura superscalară - capacitatea de a elibera până la două instrucțiuni din conducte într-un singur ciclu (ceea ce, desigur, nu înseamnă posibilitatea trecerii instrucțiunilor). prin procesor într-o jumătate de ciclu sau un ciclu).
Procesoarele Pentium cu o frecvență de 75, 90 și 100 MHz, apărute în 1994, au introdus a doua generație de procesoare Pentium. Cu aproape același număr de tranzistori, acestea au fost realizate folosind tehnologia de 0,6 microni, ceea ce a făcut posibilă reducerea consumului de energie. Acestea diferă de prima generație în multiplicarea frecvenței interne, suportul pentru configurații multiprocesor și aveau un tip de carcasă diferit. Există versiuni (75 MHz într-un pachet miniatural) pentru aplicații mobile (notebook-uri). Procesoarele Pentium din a doua generație au devenit destul de populare pe computere. In 1995 au aparut procesoarele de 120 si 133 MHz, deja realizate folosind tehnologia 0,35 microni (primele procesoare de 120 MHz au fost realizate tot cu tehnologia 0,6 microni). 1996 este numit anul Pentium - procesoarele au apărut la 150, 166 și 200 MHz, iar Pentium a devenit un procesor obișnuit pentru PC-uri cu aplicație largă.
În paralel cu Pentium, s-a dezvoltat și procesorul Pentium Pro, care s-a remarcat prin inovațiile de „execuție dinamică a instrucțiunilor”. În plus, în carcasă a fost plasat un cache secundar, pentru început cu un volum de 256 KB. Cu toate acestea, în aplicațiile pe 16 biți, precum și în mediul Windows 95, utilizarea acestuia nu oferă niciun avantaj. Procesorul conține 5,5 milioane de tranzistori de bază și 15,5 milioane de tranzistori pentru un cache secundar de 256 KB. Primul procesor cu o frecvență de 150 MHz a apărut la începutul anului 1995 (tehnologie 0,6 microni), iar deja la sfârșitul anului au apărut procesoare cu o frecvență de 166, 180, 200 MHz (tehnologie 0,35 microni), în care memoria cache a ajuns la 512 KB.
La începutul anului 1997 au apărut procesoarele Pentium MMX. Extensia MMX presupune procesarea paralelă a unui grup de operanzi cu o singură instrucțiune. Tehnologia MMX este concepută pentru a accelera execuția aplicațiilor multimedia, în special a operațiunilor cu imagini și procesare a semnalului. Pe lângă extensia MMX, aceste procesoare, în comparație cu Pentium-ul obișnuit, au cache-ul primar dublu, și unele elemente arhitecturale împrumutate de la Pentium Pr, ceea ce mărește performanța procesorului Pentium MMX în aplicațiile convenționale. Procesoarele Pentium MMX au 4,5 milioane de tranzistori și sunt realizate folosind tehnologia -.35 microni. Din iunie 1997, sunt disponibile procesoare de 166, 200 și 233 MHz.
Tehnologia MMX a fost combinată cu arhitectura Pentium Pro - iar în mai 1997 a apărut procesorul Pentium II. Este o versiune ușor redusă a nucleului Pentium Pro, cu o viteză internă mai mare de ceas, cu suport MMX adăugat. Dificultățile de a plasa cache-ul secundar în același pachet cu procesorul au fost depășite într-un mod simplu - un cip cu un nucleu de procesor și un set de cipuri de memorie statică și circuite suplimentare care implementează cache-ul secundar au fost plasate pe o placă de circuit imprimat mică. -cartuş. Toate cristalele sunt acoperite cu un capac special comun și sunt răcite de un ventilator special. Vitezele de ceas de bază sunt 233, 266 și 300 MHz.
În procesoarele familiei luate în considerare, începând cu al 486-lea, se utilizează o arhitectură combinată - un procesor CISC are un nucleu RISC. date de informații ale microprocesorului
Familia Intel 80x86 a început cu procesorul pe 16 biți 8086. Toate modelele mai vechi de procesoare, inclusiv pe 32 de biți (386th, 486th, Pentium, Pentium Pro) și cu o extensie MMX pe 64 de biți, includ un subset al comenzilor de sistem și arhitectura modele din aval, asigurând compatibilitatea cu software-ul scris anterior.
Se pare că diferențele dintre arhitectura x86-64 și IA-32 sunt chiar mai mici decât diferențele dintre IBM z/Architecture și S/390. Schimbările cheie în x86-64 în comparație cu starea actuală a IA-32 sunt puține și îndepărtate și într-un anumit sens similare cu cele introduse în tranziția de la arhitectura x86 pe 16 biți la 32 biți.
Aceste inovații includ:
Adrese virtuale pe 64 de biți (într-o implementare specifică, este posibilă o adâncime mai mică de biți);
· spațiu de adrese „plat” (plat) cu un singur spațiu de coduri, date și stivă;
· Număr de programe pe 64 de biți (RIP);
· modul de adresare relativ la contorul de programe;
· extinderea registrelor de uz general (întreg) până la 64 de biți;
· adăugarea a 8 registre noi de uz general (R8-R15);
· adăugarea a încă 8 registre SSE XMM8-XMM15 cu o capacitate de 128 (corespunde extensiei SSE2 propusă de Intel).
Orez. 1. Extinderea registrelor de uz general
„Indicațiile” pentru registre suplimentare și dimensiunile datelor sunt introduse ca prefix al comenzilor. Setul de registre de bază x86-64 este prezentat în Figura 1. Registrele sunt pe 64 de biți, cu excepția registrului EFLAGS de 32 de biți, a registrelor XMM de 128 de biți și a registrelor ST de 80 de biți în virgulă mobilă. Arhitectura x86-64 include, în special, extensiile IA-32 SSE2 introduse cu Pentium 4.
Registrul A este adresat ca AX pentru operațiuni pe 16 biți, EAX pentru operațiuni pe 32 de biți și RAX pentru operațiuni pe 64 de biți. Când se efectuează operații pe 32 de biți în care un registru întreg servește ca registru de rezultat, valorile de 32 de biți sunt completate cu zerouri până la valorile de 64 de biți. Operațiile pe 8 și 16 biți pe registre întregi păstrează biții superiori neschimbați.
Pentru a lucra cu adresarea pe 64 de biți, x86-64 a introdus Modul lung (să-l numim „mod extins”). Modul de operare este setat de bitul de control LMA (Long Mode Active), care este setat dacă microprocesorul intră în modul extins. În modul extins, registrele de segment ES, DS, FS, GS, SS sunt ignorate. Registrul CS (descriptor de segment de cod) conține biți care specifică modurile de funcționare ale microprocesorului.
Pe x86-64, modul extins are două „submoduri”: modul pe 64 de biți și modul de compatibilitate. Modul de compatibilitate oferă compatibilitate binară cu modurile x86 pe 16 și 32 biți. Selecția submodului este controlată de bitul CS.L. Dacă este setat la 0 (mod compatibilitate), un sistem de operare pe 64 de biți care rulează în modul LMA poate rula aplicații x86 mai vechi pe 16 și 32 de biți. Bitul CS.D este responsabil pentru selectarea mărimii operandului.
În mod implicit, în modul pe 64 de biți (set de biți LMA, CS.L = 1, CS.D = 0), sunt utilizați adrese de 64 de biți și operanzi de 32 de biți. Folosind prefixele de instrucțiuni, puteți modifica dimensiunea operandului (setați-l la 64 sau 16 biți), precum și dimensiunea adresei (setați-l la 32 de biți).
Aplicațiile pe 32 de biți pot folosi primii 4 GB de memorie virtuală.
Pentru a afla caracteristicile microprocesoarelor cu arhitectura x86-64, este necesar să se analizeze registrele EAX/EBX/ECX/EDX, care conțin rezultatele execuției comenzii CPUID (la apelarea acesteia, ca înainte, pune 8000_0000h în EAX). ). Dacă al 29-lea bit din EAX este 1, microprocesorul este în modul extins.
2. Microprocesoare de structuri netradiționale
2.1 Procesoare asociative
Un procesor asociativ este un procesor specializat implementat pe baza unui dispozitiv de stocare asociativ (AMU), unde, după cum știți, informațiile sunt accesate nu prin adresa operandului, ci prin caracteristicile distinctive conținute în operand însuși. Procesorul asociativ (AP) se deosebește de RAM de utilizare tradițională prin două caracteristici: prezența instrumentelor de procesare a datelor și posibilitatea scrierii paralele la toate celulele pentru care a fost înregistrată o potrivire cu o caracteristică asociativă. Ultima proprietate a AP este cunoscută ca multi-înregistrare.
Metoda de efectuare a operațiilor asupra cuvintelor ne permite să definim patru clase de procesoare asociative:
paralel;
biți-secvențial;
secvențial cuvânt cu cuvânt;
orientat pe blocuri.
Elementele procesorului multi-biți sunt utilizate ca elemente de procesare într-un procesor asociativ paralel. Fiecare PE funcționează cu propriul modul de memorie asociativă și căutări, precum și cu procesarea aritmetică și logică a cuvintelor pe m-biți. Transferul cuvintelor selectate de conținut între AZU și PE este asigurat de circuite de comutare. Elementele procesorului execută simultan aceeași comandă venită de la procesorul de control. În plus, se poate face schimb de date între modulele memoriei asociative și memoria principală, iar accesul prin acest canal se face ca în memoria convențională - prin adrese.
În comparație cu alte clase de procesoare asociative, AP-urile paralele au cea mai mare performanță, dar acest lucru se realizează în detrimentul costurilor mari de hardware.
2.2 Procesoare Matrix
Un procesor matrice este format dintr-un număr mare de procesoare similare care execută aceeași secvență de instrucțiuni pentru diferite seturi de date. Primul astfel de procesor din lume a fost ILLIAC IV (Universitatea din Illinois). Este prezentat schematic în Fig. 2.6. Ideea inițială a fost de a construi o mașină formată din patru cadrane, fiecare dintre ele conținând o matrice 8 x 8 de blocuri procesor/memorie. A existat un bloc de control pentru fiecare cadran. A trimis comenzi care au fost executate de toate procesoarele simultan, în timp ce fiecare procesor își folosea propriile date din propria memorie (datele au fost încărcate în timpul inițializării).
Această soluție, care diferă semnificativ de mașina standard von Neumann, este uneori denumită arhitectura SIMD (Single Instruction-stream Multiple Data-stream). Datorită costului foarte mare, a fost construit doar un astfel de cadran, dar ar putea efectua 50 de milioane de operații în virgulă mobilă pe secundă. Dacă mașina ar fi construită folosind patru cadrane, ar putea efectua 1 miliard de operații în virgulă mobilă pe secundă, iar puterea de calcul a unei astfel de mașini ar fi de două ori mai mare decât a computerelor din întreaga lume.
Orez. 2. Procesor matrice ILLIAC IV
2.3 Procesoare ADN
Procesorul ADN se caracterizează prin structura și setul de instrucțiuni. Structura procesorului este structura moleculei de ADN. Și un set de comenzi este o listă de operații biochimice cu molecule. Principiul memoriei ADN-ului computerizat se bazează pe conexiunea secvenţială a patru nucleotide (principalele blocuri ale lanţului ADN). Trei nucleotide, care se conectează în orice secvență, formează o celulă de memorie elementară - un codon, a cărui totalitate formează apoi un lanț de ADN. Principala dificultate în dezvoltarea calculatoarelor ADN este asociată cu reacții selective cu un singur codon (interacțiuni) în cadrul lanțului ADN. Există echipamente experimentale care vă permit să lucrați cu unul dintre cei 1020 de codoni sau molecule de ADN. O altă problemă este autoasamblarea ADN-ului, ceea ce duce la pierderea de informații. Este depășită prin introducerea de inhibitori speciali în celulă - substanțe care împiedică reacția chimică de auto-reticulare.
2 .4 Procesoare celulare
Termenul „neurocomputer” înseamnă în prezent o clasă destul de largă de calculatoare. Formal, orice implementare hardware a unui algoritm de rețea neuronală poate fi considerată un neurocomputer, de la un simplu model al unui neuron biologic la un sistem de recunoaștere a caracterelor sau ținte în mișcare. Neurocalculatoarele nu sunt computere în sensul convențional al cuvântului. În prezent, tehnologia nu a atins încă nivelul de dezvoltare la care s-ar putea vorbi de un neurocomputer de uz general (care ar fi și inteligență artificială).
2.5 Procesoare de comunicații
Procesoarele de comunicații sunt microcipuri care sunt o încrucișare între ASIC-uri rigide și procesoare flexibile de uz general.
Procesoarele de comunicație sunt programate, ca procesoarele PC cunoscute nouă, dar construite având în vedere sarcinile de rețea, optimizate pentru funcționarea în rețea și, pe baza acestora, producătorii - atât procesoare, cât și echipamente - scriu software pentru aplicații specifice.
Procesorul de comunicații are propria memorie și este echipat cu canale externe de mare viteză pentru conectarea cu alte noduri de procesor. Un procesor de comunicații de mare viteză cu un nucleu RISC vă permite să gestionați schimbul de date pe mai multe canale independente, să suportați aproape toate protocoalele comune de schimb, să distribuiți și să procesați în mod flexibil și eficient fluxurile de date seriale cu canale de divizare în timp.
2.6 Procesoare de baze de date
Procesoarele de baze de date (mașini) sunt denumite în prezent sisteme hardware și software concepute pentru a îndeplini toate sau unele dintre funcțiile sistemelor de gestionare a bazelor de date (DBMS). Dacă la un moment dat sistemele de gestionare a bazelor de date erau destinate în principal stocării de text și informații numerice, acum sunt concepute pentru o mare varietate de formate de date, inclusiv grafică, sunet și video. Procesoarele de baze de date îndeplinesc funcții de gestionare și distribuție, oferă acces de la distanță la informații prin gateway-uri și reproduc datele actualizate folosind diferite mecanisme de replicare.
Procesoarele moderne de baze de date trebuie să asigure o conexiune naturală a informațiilor acumulate în bazele de date cu instrumente de procesare a tranzacțiilor online și aplicații pe Internet. Acestea ar trebui să fie sisteme care să ofere utilizatorilor posibilitatea de a accesa și analiza datele corporative în orice moment, indiferent de locul în care se află aceste date.
Rezolvarea unor astfel de probleme necesită o creștere semnificativă a performanței unor astfel de sisteme. Cu toate acestea, implementarea software tradițională a numeroase funcții ale SGBD-ului modern pe computere de uz general duce la sisteme greoaie și neproductive cu o fiabilitate insuficient de ridicată. Este necesar să se caute noi soluții arhitecturale și hardware. Cercetările intense care se desfășoară în prezent în acest domeniu au condus la înțelegerea necesității de a utiliza sisteme de calcul paralele specializate ca procesoare de baze de date. Crearea unor astfel de sisteme este asociată cu implementarea paralelismului atunci când se efectuează o secvență de operațiuni și tranzacții, precum și procesarea datelor în flux prin pipeline.
2.7 Procesoare de flux
Procesoarele de flux sunt numite procesoare, care se bazează pe principiul procesării multor date cu o singură instrucțiune. Conform clasificării lui Flynn, ele aparțin arhitecturii SIMD (single instruction stream / multiple data stream). Tehnologia SIMD vă permite să efectuați aceeași operație, cum ar fi scăderea și adunarea, pe mai multe seturi de numere în același timp. Procesorul de flux îmbunătățește performanța generală, ceea ce este deosebit de important atunci când lucrați cu grafică 3D. Poate exista un singur procesor de streaming (Single-streaming processor - SSP) și un procesor multi-threaded (Multi-Streaming Processor - MSP).
Un reprezentant proeminent al procesoarelor stream este familia de procesoare Intel, începând cu Pentium III, bazată pe tehnologia Streaming SIMD Extensions (SSE). Matricele procesoarelor sunt considerate reprezentative ale clasei SIMD: ILLIAC IV, ICL DAP, Goodyear Aerospace MPP, Connection Machine 1 etc. În astfel de sisteme, un singur controler controlează mai multe elemente ale procesorului. Fiecare element de procesor primește aceeași instrucțiune de la dispozitivul de control la fiecare moment fix în timp și o execută pe datele sale locale.
2.8 Procesoare cu logica multitasking (fuzzy).
Procesorul cu logica fuzzy (logica fuzzy) se bazeaza pe matematica fuzzy.
Logica fuzzy nu va rezolva acele probleme care nu pot fi rezolvate pe baza logicii binare, dar în multe cazuri este mai convenabilă, mai productivă și mai ieftină. Soluțiile hardware specializate (calculatoare fuzzy) dezvoltate pe baza acesteia vor oferi avantaje reale în performanță. Dacă punem în cascadă calculatoare neclare, vom obține una dintre opțiunile pentru un neuroprocesor sau o rețea neuronală. În multe cazuri, aceste concepte sunt pur și simplu combinate, numind termenul general „logică neuro-fuzzy”.
2.9 Procesoare de semnal
Familia DSP568xx se bazează pe nucleul procesorului DSP56800 cu punct fix de 16 biți. Acest nucleu este conceput pentru a rezolva eficient problemele de control și procesare a semnalului digital. Setul său de instrucțiuni oferă procesarea semnalului digital cu performanța celor mai bune DSP-uri de uz general și răspunde nevoii de creare ușoară a programelor de control compacte.
Nucleul DSP56800 este un procesor CMOS programabil pe 16 biți, proiectat pentru procesarea semnalului digital în timp real și sarcinile de calcul. Nucleul DSP56800 (Fig. 26) este format din patru unități funcționale: controlul programului, generarea adresei, procesarea aritmetic-logică a datelor, procesarea biților. Pentru a crește performanța, operațiunile în dispozitive sunt efectuate în paralel. Fiecare dintre dispozitive are propriul set de registre și logică de control și este organizat în așa fel încât să poată funcționa independent și simultan cu celelalte trei. Adresele interne și magistralele de date interconectează memoria, dispozitivele funcționale și periferice (registrele dispozitivelor periferice sunt situate în zona de memorie). Astfel, nucleul implementează executarea simultană a mai multor acțiuni: dispozitivul de control selectează prima instrucțiune, generatorul de adrese generează până la două adrese ale celei de-a doua instrucțiuni, iar ALU realizează înmulțirea celei de-a treia instrucțiuni. Există o posibilitate alternativă: în a treia instrucțiune, operația poate fi efectuată nu de ALU, ci de procesorul de biți. Arhitectura pipeline face posibilă implementarea funcționării în paralel a dispozitivelor incluse în microcip și reduce semnificativ timpul de execuție a programului.
3. Sisteme multiprocesor
3.1 Cerințe generale pentru un sistem cu microprocesor
Pentru a compara diferite computere între ele, se folosesc de obicei metode standard de măsurare a performanței. Aceste metodologii permit dezvoltatorilor și utilizatorilor să folosească scorurile testelor pentru a evalua soluțiile și, în final, performanța și costul sunt cele care oferă utilizatorului o bază rațională pentru a decide ce computer să aleagă.
Cea mai importantă caracteristică a sistemelor de calcul este fiabilitatea. Îmbunătățirea fiabilității se bazează pe principiul prevenirii defecțiunilor prin reducerea ratei defecțiunilor și defecțiunilor prin utilizarea circuitelor și componentelor electronice cu un grad ridicat și ultra-înalt de integrare, reducerea nivelului de interferență, moduri mai ușoare de funcționare a circuitelor, asigurarea modurilor termice de funcționare a acestora, precum și prin îmbunătățirea metodelor de asamblare a echipamentelor.
Scalare este capacitatea de a crește numărul și puterea procesoarelor, cantitatea de RAM și memorie externă și alte resurse ale sistemului de calcul. Scalare trebuie să fie asigurată de arhitectura și designul computerului, precum și de instrumente software adecvate.
Compatibilitate software și portabilitate. Conceptul de compatibilitate software a fost folosit pentru prima dată la scară largă de către dezvoltatorii sistemului IBM/360. Sarcina principală în proiectarea întregii game de modele a acestui sistem a fost crearea unei arhitecturi care să fie aceeași din punctul de vedere al utilizatorului pentru toate modelele de sistem, indiferent de prețul și performanța fiecăruia dintre ele. Avantajele uriașe ale acestei abordări, care vă permite să păstrați stocul de software existent atunci când treceți la modele noi (de obicei mai productive), au fost rapid apreciate atât de producătorii de computere, cât și de utilizatori, iar de atunci aproape toți furnizorii de echipamente informatice au adoptat aceste principii., furnizând o serie de calculatoare compatibile. Trebuie remarcat, însă, că în timp, chiar și cea mai avansată arhitectură devine inevitabil învechită și este nevoie să se facă schimbări radicale în arhitectura și modalitățile de organizare a sistemelor de calcul.
3.2 Clasificarea sistemelor paralele de prelucrare a datelor
Există patru tipuri principale de arhitectură pentru sistemele de procesare paralelă:
Procesare prin conducte și vectori. Baza procesării pipeline este executarea separată a unei operațiuni în mai multe etape (pentru mai multe etape) cu transferul de date de la o etapă la alta. În acest caz, productivitatea crește datorită faptului că mai multe operații sunt efectuate simultan în diferite etape ale transportorului.
Conducta este eficientă numai atunci când conducta este aproape de sarcina maximă, iar viteza de alimentare a operanzilor noi se potrivește cu debitul maxim al conductei. Dacă apare latența, atunci vor fi efectuate mai puține operațiuni în paralel și performanța generală va scădea. Operațiile vectoriale oferă o oportunitate ideală de a încărca complet conducta de calcul.
sisteme de tip SIMD. Mașinile de tip SIMD constau dintr-un număr mare de elemente de procesor identice cu propria lor memorie. Toate elementele procesorului dintr-o astfel de mașină execută același program. Evident, o astfel de mașină, compusă dintr-un număr mare de procesoare, poate oferi performanțe foarte mari doar la acele sarcini în care toate procesoarele pot face aceeași treabă. Modelul de calcul pentru o mașină SIMD este foarte similar cu cel pentru un procesor vectorial: o singură operație este efectuată pe un bloc mare de date.
sisteme de tip MIMD. Termenul „multiprocesor” acoperă majoritatea mașinilor MIMD și (similar cu modul în care termenul „procesor matrice” este aplicat mașinilor SIMD) este adesea folosit ca sinonim pentru mașinile MIMD. Într-un sistem multiprocesor, fiecare element de procesor (PE) își execută programul destul de independent de celelalte elemente de procesor.
Sisteme multiprocesor cu procesoare SIMD. Multe supercalculatoare moderne sunt sisteme multiprocesor care folosesc procesoare vectoriale sau procesoare de tip SIMD ca procesoare. Astfel de sisteme aparțin mașinilor din clasa MSIMD.
3.3 Modele de comunicare și arhitecturi de memorie
Fiecare dintre mecanismele de schimb de date are propriile sale avantaje. Pentru partajarea în memoria partajată, aceasta include:
Compatibilitate cu mecanisme bine înțelese utilizate atât în sistemele uniprocesoare, cât și în sistemele multiprocesoare la scară mică, care utilizează memoria partajată pentru a schimba
Ușurință de programare atunci când modelele de comunicare între procesoare sunt complexe sau se modifică dinamic în timpul rulării. Beneficii ca acestea facilitează construirea unui compilator.
Latență mai scăzută a schimbului și o utilizare mai bună a lățimii de bandă la schimbul de porțiuni mici de date
Abilitatea de a utiliza memorarea în cache controlată de hardware pentru a reduce frecvența comunicării la distanță, permițând stocarea în cache a tuturor datelor, atât partajate, cât și nepartajate.
Principalele avantaje ale schimbului folosind transmiterea mesajelor sunt:
Hardware-ul poate fi mai simplu, mai ales în comparație cu un model de memorie partajată care acceptă coerența cache scalabilă.
Modelele de schimb sunt de înțeles, forțând programatorii (sau compilatorii) să acorde atenție schimbului, care de obicei are un cost ridicat asociat cu acesta.
La evaluarea oricărui mecanism de schimb, trei caracteristici de performanță sunt critice:
1. Lățimea de bandă: În mod ideal, lățimea de bandă a mecanismului de schimb va fi limitată de lățimile de bandă ale procesorului, memoriei și sistemului de interconectare și nu de niciun aspect al mecanismului de schimb. Suprafața asociată cu mecanismul de schimb (de exemplu, lungimea comunicării inter-procesor) afectează direct lățimea de bandă.
2. Latența: în mod ideal, latența ar trebui să fie cât mai mică posibil. Pentru a o determina, costurile generale de hardware și software asociate cu inițierea și finalizarea schimbului sunt critice.
3. Ascundere întârziere: cât de bine ascunde mecanismul întârzierea prin suprapunerea schimbului cu calcule sau cu alte schimburi.
Fiecare dintre acești parametri de performanță afectează caracteristicile schimbului. În special, întârzierea și lățimea de bandă pot varia în funcție de dimensiunea articolului. În general, un mecanism care funcționează la fel de bine cu cantități mici și mari de date va fi mai flexibil și mai eficient.
3.4 Sisteme multiprocesor cu memorie partajată
Cheia implementării atât a schemei de scriere cu revocare, cât și a schemei de scriere cu actualizare în sistemele multiprocesor cu un număr mic de procesoare este utilizarea unui mecanism de magistrală pentru a efectua aceste operațiuni. Pentru a efectua o operațiune de actualizare sau de eliminare, procesorul pur și simplu preia magistrala și traduce peste ea adresa la care datele ar trebui să fie actualizate sau aruncate.
Toate procesoarele monitorizează continuu magistrala, monitorizând adresele care apar pe ea. Procesoarele verifică dacă adresa care a apărut pe magistrală se află în memoria lor cache. Dacă da, atunci datele corespunzătoare din cache sunt fie invalidate, fie actualizate, în funcție de protocolul utilizat. Ordinea de acces secvențială inerentă magistralei asigură, de asemenea, că operațiunile de scriere sunt strict secvențiale, deoarece atunci când două procesoare concurează pentru a scrie în aceeași locație, unul dintre ele trebuie să acceseze magistrala înaintea celuilalt.
Etichetele cache obișnuite pot fi folosite pentru a implementa procesul de monitorizare. Mai mult, bitul valid menționat anterior facilitează implementarea revocării. Erorile de citit, fie că sunt cauzate de o invalidare sau de un alt eveniment, nu sunt, de asemenea, greu de înțeles, deoarece se bazează pur și simplu pe posibilitatea de observare. Pentru operațiunile de scriere, am dori să știm și dacă există și alte copii în cache ale blocului, deoarece dacă nu există astfel de copii, scrierea nu poate fi trimisă la magistrală, ceea ce reduce timpul de finalizare a scrierii, precum și lățimea de bandă necesară.
3.5 Sisteme multiprocesor cu memorie locală
Există două moduri diferite de a construi sisteme de memorie distribuite (locale) la scară largă. Cea mai simplă modalitate este de a elimina mecanismele hardware care asigură coerența cache-ului și de a se concentra pe crearea unui sistem de memorie scalabil.
Pentru a rezolva problemele de coerență, datele partajate (partajate) nu sunt stocate în cache. Desigur, software-ul poate implementa un fel de schemă de stocare în cache pentru datele partajate prin copierea acestora din spațiul de adrese partajat în memoria locală a unui anumit nod. În acest caz, coerența memoriei va fi controlată și de software. Avantajul acestei abordări este că suportul hardware necesar este practic minim, deși prezența, de exemplu, a unor caracteristici precum copierea în bloc (grup) a datelor ar fi foarte utilă. Dezavantajul unei astfel de organizații este că mecanismele de suport software a coerenței acestui tip de memorie cache de către compilator sunt foarte limitate. Tehnica actuală este potrivită în principal pentru programele cu paralelism bine structurat la nivelul ciclului programului.
4. Moduri de schimburi ale sistemelor cu microprocesoare
Principalele moduri de schimb sunt schimbul controlat de software, schimbul în modul de întrerupere și schimbul de acces direct la memorie.
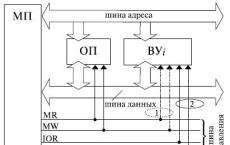
Schimbul controlat de program este efectuat la inițiativa comenzii procesate și include citirea informațiilor către microprocesor din OP, scrierea informațiilor către OP de la MP, introducerea informațiilor în MP de la VU și transmiterea informațiilor de la MP către VU. Luați în considerare tipurile de schimb enumerate.
Citirea informațiilor în microprocesor din memoria principală începe din momentul în care este emisă valoarea adresei celulei OP din care informațiile ar trebui citite de la MP la SHA. În funcție de „citirea” pulsului de sincronizare (RD) care vine de la MP la SHU, celulele dorite ale OP sunt activate. Informațiile din OP intră în SD, sunt transferate către MP și sunt scrise în registrul corespunzător al MP.
Scrierea informațiilor în memoria principală din MP începe în același mod ca în primul caz: de la MP la SHA, se primește valoarea adresei celulei OP în care ar trebui să se facă înregistrarea, iar MP generează un semnal de „scriere” (WR) pe linia SHU. În același timp, informațiile de la MP intră în SD, sunt transferate în OP și sunt scrise în celula de memorie corespunzătoare.
Introducerea informațiilor în MP de la un dispozitiv extern începe cu un semnal de sincronizare de la dispozitivul de control sau MP, dar adresa unui anumit canal KVV care este conectat la VU necesar și prin care introducerea (citirea) informațiilor în MP va apărea este trimis către SHA. Un astfel de canal se numește port. După ceva timp pe linie SHU MP generează un semnal de control RD „citire” (sau „intrare”). Este activat portul solicitat la adresa specificată, iar la semnalul RD, informațiile de la VU ajung prin port către motorul pas cu pas. Potrivit acesteia, informațiile sunt transmise deputatului.
Ieșirea informațiilor de la MP către un dispozitiv extern se realizează prin formarea MP pe liniile SHA ale adresei canalului (portului) KVV, care este conectat la VU-ul necesar. După o anumită perioadă de timp, MP generează un semnal WR de „înregistrare” (sau „ieșire”) pe linia WR și transmite informații către SD care trebuie scrise (ieșite) în VU-ul necesar. Portul de ieșire solicitat la adresa specificată este activat și informațiile de la SD ajung la VU specificat.
Schimb de întreruperi. Schimbul în modul de întrerupere este conceput pentru a procesa programele de serviciu de cerere de întrerupere generate de VU în procesul de acumulare a informațiilor de către acestea în timpul funcționării. Momentul solicitărilor de întrerupere generate de VU este un fenomen aleatoriu și, în cele mai multe cazuri, nu poate fi programat.
Schimbul în modul de întrerupere este inițiat de către VU sau KVV care deservește acest VU și se efectuează exact în acele momente de timp când VU-ul corespunzător este gata pentru transferul de date către MP. De îndată ce este gata să transfere date, controlerul de întrerupere care deservește acest VU generează un semnal de solicitare de întrerupere, pe care MP-ul îl analizează și, dacă este necesar, întrerupe programul în curs de procesare și trece la operația de schimb - introducerea și procesarea serviciului de întrerupere. program.
Există hardware, software și întreruperi speciale.
Întreruperile hardware, numite în practică și întreruperi externe, apar atunci când sunt expuse la semnale care sunt generate de VU care necesită service. Întreruperile hardware sunt utilizate, de regulă, pentru a deservi VU-ul la cererea acestor dispozitive. Ele pot fi nemascabile și mascabile.
Întreruperile nemascabile sunt întreruperi care sunt declanșate de hardware extern și nu pot fi dezactivate de programul în curs de execuție. Solicitările pentru astfel de întreruperi sunt trimise la o intrare specială a microprocesorului - intrarea întreruperilor nemascabile. Acestea sunt deservite fără greșeală și imediat, indiferent de importanța programului în curs de execuție.
Întreruperi mascate - întreruperi care pot fi activate sau dezactivate de software - prin includerea în program de instrucțiuni speciale care activează sau dezactivează întreruperile într-o anumită secțiune a programului. Pentru a implementa astfel de întreruperi, microprocesorul are una sau mai multe intrări mascate de solicitare a serviciului de întrerupere.
Schimb în modul de acces direct la memorie. În modurile considerate mai devreme, schimbul de informații se realizează între MP și OP sau între MP și VU. Cu toate acestea, în practică, este adesea nevoie de un schimb rapid de informații între VU și PO fără procesarea acestora. În acest caz, la utilizarea modurilor descrise anterior, procedura de schimb trebuie să conțină două cicluri. În primul ciclu, informațiile trebuie mai întâi transferate de la VU (sau OP) la acumulatorul MP, în al doilea ciclu, informațiile de la acumulator trebuie introduse în OP (sau VU).
Atunci când faceți schimb cu VU-uri cu acțiune lentă și transferați cantități mari de informații, o astfel de procedură în două etape reduce semnificativ cursul de schimb, adică duce la o scădere a performanței MPS în ansamblu. În acest sens, se utilizează o metodă de schimb, în care informațiile sunt scrise în OP din VU sau informațiile sunt citite din memorie pe un dispozitiv extern direct fără participarea MP. Acest tip de schimb se numește schimb de acces direct la memorie (DMA).
Pentru a organiza schimbul, se folosește un dispozitiv de control special - controlerul PDP, care în timpul schimbului îndeplinește funcțiile unui dispozitiv activ, adică setează adresa celulei OP sau portul VU care participă la schimb. pe liniile SHA, generează semnalele de control necesare pe liniile SHU, determină începerea transferului de informații prin linii SD.
În cazul schimbului controlat de program și în cazul schimbului în modul de întrerupere, MP gestionează magistrala (adresă, date și magistrale de control). La schimbul în modul DMA, portbagajul trebuie transferat la dispoziția controlerului DMA, iar MP-ul trebuie deconectat de la autobuze. În acest scop, MP furnizează o intrare a unui semnal de control special „cerere captare anvelope”, la primirea căruia, după încheierea ciclului curent de execuție a comenzii, dispozitivul de control MP comută dispozitivele tampon ale anvelopelor sale într-un mod cu o rezistență ridicată de ieșire (stare de impedanță ridicată). În același timp, MP este deconectat de la trunchiuri, iar dispozitivul său de control pe o linie de control specială generează un semnal de permisie de captare a magistralei către controlerul PDP și pune trunchiul la dispoziție pentru transmiterea fie a unui singur cuvânt, fie a unei game întregi de informații. .
5. Canale de transfer de informații în sistemele cu microprocesoare
Circuitele de interfață sunt împărțite în mai multe niveluri:
Interfețele de magistrală de nivel 1 asigură schimbul de informații între toate modulele (sau principalele) ale sistemului cu microprocesor. Alegerea majorității magistralelor de acest nivel este determinată de arhitectura microprocesorului, de exemplu, interfața I-41 (Multibus) este utilizată pentru MPC-urile din seria K580, K1810, interfața paralelă intermodulă (IPI) - pentru K1801/ MPC-uri din seria 1809, K1811, K581, K5S8 etc.
Busul S-100 a fost creat pentru microprocesoare pe 8 biți și diverse aplicații industriale.
Caracteristicile sale tipice au fost următoarele:
Dimensiuni: 134mm x 254mm, 100 pini
Conector: 50 de pini pe fiecare parte a plăcii
Tensiune de alimentare nereglată: +8V, +16V.
Autobuz ISA. În calculatoarele PC AT care utilizează microprocesorul i80286, pentru prima dată, a început să fie utilizată noul bus de sistem ISA (Industry Standard Architecture), realizând pe deplin capacitățile microprocesorului menționat. Numărul de linii de adresă a fost crescut cu patru, iar numărul de linii de date cu opt. Astfel, a fost posibil să transferați 16 biți de date în paralel și, datorită celor 24 de linii de adresă, să accesați direct 16 MB de memorie de sistem. Numărul de linii de întrerupere hardware de pe această magistrală a fost crescut de la 7 la 15, iar numărul de canale DMA de la 4 la 7.
Autobuzul EISA oferă o cantitate mai mare posibilă de memorie adresabilă, transfer de date pe 32 de biți, inclusiv în modul DMA, un sistem de întrerupere îmbunătățit și arbitraj DMA, configurarea automată a sistemului și cardurile de expansiune.
Autobuzul Nubus are aproximativ aceleași caracteristici ca și ISA.
Autobuzul Multibus-II a fost dezvoltat în 1985 ca o dezvoltare a standardului Multibus utilizat pe scară largă în automatizarea industrială. Multibus-II este o magistrală pe 32 de biți și poate rula la viteza procesorului de control - până la un debit de 80 MB/s. Spre deosebire de celelalte autobuze discutate aici, Multibus are capacitatea de a trimite mesaje de mare viteză între diferite dispozitive de control. În același timp, mecanismul de transfer permite organizarea interacțiunii „inteligente” între procesatori și controlori. Acest lucru este deosebit de important atunci când se creează sisteme multiprocesor și se construiesc complexe complexe de electronice industriale.
Autobuzul MC (MicroChannel) a apărut în 1987 pe computerele PS/2. Suficient de rapidă (până la 20 MHz, până la 76 MB/s) și lată (32 de biți), magistrala conținea o serie de soluții arhitecturale de succes și putea concura cu ușurință pentru conducerea între magistralele de sistem.
Are următoarele caracteristici:
8/16/32 - linii de date de biți,
Întreruperi după nivelul semnalului (spre deosebire de ISA, unde întreruperile sunt la marginea semnalului de ceas),
24 sau 32 de linii de adresă (adresând până la 4 GB de memorie),
Configurarea automată a plăcilor (pe baza informațiilor din ROM-ul acestor plăci),
Protocol de transfer de date asincron.
Sbus a fost dezvoltat în 1989 pentru a funcționa până la 25 MHz. Este conceput pentru a transfera date pe 32 de biți. Caracteristica sa este capacitatea de a traduce automat adresele virtuale în adrese fizice, de a recunoaște erorile în transferul de date și de a iniția reîncercări.
Mbus a fost creat în 1990 și este conceput pentru a transfera date pe 64 de biți. Mbus este compatibil cu alte autobuze, are opțiuni portabile și include capabilități de mesagerie.
Bus-ul SCSI (Small Computer System Interface) este reglementat de standardul IEC 9316, care unifică nivelurile de bază pentru tipurile de bază de dispozitive periferice, în principal unități de disc magnetice, ADC-uri, precum și posibilitatea extinderii funcțiilor prin coduri și câmpuri speciale. . Interfața folosește adresarea logică a tuturor blocurilor de date și capacitatea de a citi informații despre numărul de blocuri disponibile de la dispozitivele cu acces direct.
Autobuzul PCI are mai multe avantaje față de VL-Bus-ul principal. Până la 10 dispozitive pot fi conectate la magistrală conform specificațiilor PCI. Acest lucru, însă, nu înseamnă utilizarea aceluiași număr de sloturi de expansiune - limitarea se aplică numărului total de componente, inclusiv celor situate pe placa de bază. Deoarece fiecare placă de expansiune PCI poate fi partajată între două periferice, numărul total de sloturi instalate este redus.
Interfața MPI cu adrese multiplexate și linii de date este proiectată pentru a oferi compatibilitate informațională și electrică a dispozitivelor sistemului. Este implementat pe baza coloanei vertebrale și a nodurilor logice incluse în fiecare dispozitiv conectat la acesta. Dispozitivele împreună formează un singur spațiu de adresă al coloanei vertebrale.
Interfața Unibus conține o coloană vertebrală de 56 de linii de semnal. Toate dispozitivele sunt conectate la aceste linii în paralel. Cinci linii de semnal simplex sunt utilizate pentru a controla magistrala prioritară, restul de 51 de linii sunt duplex; Cele 18 linii de adresă sunt folosite de către master pentru a selecta cu ce slave să comunice. Una dintre liniile de adresă specifică octetul care trebuie accesat în timpul operațiunilor cu octeți; 16 linii de date sunt folosite pentru a transfera informații între master și slave. Două linii de control definesc una dintre cele patru operațiuni de schimb posibile (două moduri de intrare și două moduri de ieșire).
Interfața I-41 este una dintre variantele interfeței Multibus, care combină interfețele standardizate IEEE, VME - magistrală, AMS - magistrală etc., păstrând în același timp compoziția liniilor și funcțiile acestora.
Interfețele de nivel 2 oferă o combinație de dispozitive externe și dispozitive de comunicare cu obiecte (USO), care sunt utilizate în cazurile în care VU și OCO nu au o interfață de sistem încorporată și nu pot fi conectate direct la coloana vertebrală a sistemului. Interfața IRPS pentru conectarea radială a dispozitivelor cu transmitere în serie a informațiilor și interfața IRPR pentru conectarea dispozitivelor cu transmitere paralelă a informațiilor sunt cele mai utilizate aici. Cu ajutorul lor, aproape toate dispozitivele periferice (monitoare, imprimante, tastaturi, plotere etc.) sunt conectate, cu excepția dispozitivelor de stocare externe care solicită mai mult lățimea de bandă a interfeței.
Interfețele de nivel 3 sunt concepute pentru a combina senzori și actuatori. Varietatea mare de senzori și actuatoare până în prezent a condus la dezvoltarea unui număr mare de aceste interfețe. Interfețe
4 niveluri sunt interfețe pentru dispozitivele de transmisie a datelor (DDU). Acestea includ interfețe pentru telegraf, telefon, canale de înaltă frecvență, fibră optică și alte canale pentru transmisia de date pe distanțe lungi. Aceasta include, de asemenea, interfețele sistemelor de control distribuit pentru scopuri generale și speciale (KAMAK IEC - 640, IEC - 625 - 1 serial, ILPS - 2 etc.) și interfețe ale rețelelor locale de uz general (R - 802, etc.)
Interfețele de nivel 5 includ interfețe externe sistemului cu microprocesor. Interfața externă este conectată la interfața sistemului folosind un adaptor de interfață special.
interfata AGP conceput pentru a transmite informații către dispozitive externe, inclusiv afișarea datelor. Conține o magistrală și un dispozitiv de transfer de informații (accelerator video) care formează un circuit de interfață. În prezent, interfața AGP este cea mai utilizată.
6. Sarcina individuală
Intel Pentium T2130
Intel Pentium T2130 este un microprocesor dual-core, cel mai recent membru al liniei Dual-Core T2xx, care a fost lansat în aprilie 2007.
Particularitati:
2 fluxuri
Tehnologie SpeedStep îmbunătățită
Executa bit dezactivat
Suport MMX, SSE, SSE2, SSE3
Tehnologia de virtualizare Intel® (VT-x)
Soclu procesor - mufa M
Arhitectură:
Intel Pentium Dual-Core T2130 bazat pe Pentium M îmbunătățit.
151 milioane de tranzistori
Dimensiunea miezului procesorului - 90 mm?
Miezul procesorului - Yonah
Caracteristici:
Microprocesorul Intel Pentium Dual-Core T2130 are 2 nuclee cu o frecventa de 1,86 GHz.
Frecvența magistralei de sistem - 533 MHz
Cache de nivel 1 - 2 x 32 KB instrucțiuni 2 x 32 KB cache de date
Cache de nivel 2 - 1 MB
Putere maxima 31 W.
Tensiune de funcționare 1 - 1,3 V
Avantaje:
Are un cost relativ mic.
Tehnologia Intel SpeedStep îmbunătățită.
Asigură o productivitate ridicată a computerelor.
Consum redus de putere
multifunctional
Defecte:
Dimensiunea cache limitată.
Nu acceptă memoria ECC (memorie de corecție a erorilor hardware).
Nu acceptă tehnologiile Turbo Boost, Hyper Threading
Nu acceptă calcul pe 64 de biți
Literatură
1. http://www.osp.ru/os/2002/04/181300/
2. https://ru.wikipedia.org/wiki/X86-64
3. http://www.nsc.ru/win/elbib/data/show_page.dhtml?77+852
4. http://www.island-formoza.ru/arhitektura-pc/parallelizm-na-urovne-processorov.html
5. http://libeldoc.bsuir.by/bitstream/123456789/989/81.pdf
6. http://mrmarker.ru/p/page.php?id=14738
Găzduit pe Allbest.ru
...Documente similare
Definiții ale teoriei bazelor de date (DB). Elemente de aplicare a sistemelor informatice. Modele de date relaționale. Sarcina sistemelor de management al bazelor de date distribuite. Mijloace de procesare paralelă a cererilor. Utilizarea bazei de date pentru inventariere.
lucrare de termen, adăugată 05.01.2015
Conceptul și clasificarea sistemelor de transmisie a datelor. Caracteristicile sistemelor de transmisie de date fără fir. Caracteristicile sistemelor de transmisie de date cu fir: sisteme cu fibră optică și fibre coaxiale, perechi răsucite, fire. Evaluarea producătorilor de echipamente.
lucrare de termen, adăugată 03/04/2010
Structura generală a microprocesorului. Structura subsistemului de memorie pe 64 de biți. Selectarea portului I/O. Caracteristicile interfeței sistemelor cu microprocesor. Proiectarea unui subsistem de memorie bazat pe Itanium 2. Calculul continutului informativ si al volumelor necesare.
lucrare de termen, adăugată 12.05.2012
Microprocesor ca dispozitiv universal pentru efectuarea procesării software a informațiilor. Functionalitate si solutii arhitecturale. Microcontrolere în sisteme de control și procesare a informațiilor. Clasificarea calculatoarelor electronice.
lucrare de termen, adăugată 10.12.2015
Clasificări ale arhitecturilor sistemelor de calcul. Organizarea sistemelor informatice. dispozitiv CPU. Principii de dezvoltare a calculatoarelor moderne. Evoluția sistemelor cu microprocesoare. Creșterea numărului și compoziției unităților funcționale.
teză, adăugată 29.01.2009
Sisteme moderne de prelucrare a datelor. Sistem informatic automat. Conceptul de informație și model dinamic. Apariția multor tipuri diferite de sisteme care diferă în principiile de construcție și regulile de prelucrare a informațiilor încorporate în acestea.
prezentare, adaugat 14.10.2013
Principalele componente ale unui sistem informatic. Istoricul dezvoltării, caracteristicile utilizării microprocesoarelor. Dispozitivul și funcționarea declanșatorului D. Schema schematică, directive, operatori și descrierea programului pentru microprocesoare, tipuri de depanare.
manual de instruire, adăugat 27.11.2011
Cerințe și structura sistemelor de prelucrare a informațiilor economice. Tehnologia de prelucrare a informațiilor și întreținerea sistemului, protecția informațiilor. Procesul de creare de interogări, formulare, rapoarte, macrocomenzi și module. Instrumente pentru organizarea bazelor de date și lucrul cu acestea.
lucrare de termen, adăugată 25.04.2012
Dezvoltarea istorică a instalațiilor de calcul. Diagrame bloc ale sistemelor de calcul. Dezvoltarea bazei elementului și dezvoltarea arhitecturii sistemelor în sine. Clasele principale de calculatoare. Canale de date. Cerințe pentru compoziția dispozitivelor periferice.
rezumat, adăugat la 01.09.2011
Forme de informații transmise. Principalele tipuri de model de date utilizate. Nivelurile proceselor informaționale. Căutare de informații și căutare de date. Stocare în rețea. Probleme de dezvoltare și întreținere a depozitelor de date. Tehnologii de prelucrare a datelor.
Interfață este un set de software și hardware conceput pentru a transfera informații între componentele computerului și include circuite electronice, linii, magistrale și semnale de adrese, date și control, algoritmi de transmisie a semnalelor și reguli de interpretare a semnalelor de către dispozitive.
În sens larg, interfața include și partea mecanică (compatibilitate prin conectori standard) și circuite auxiliare care asigură compatibilitatea electrică a dispozitivelor în ceea ce privește nivelurile semnalelor logice, curenții de intrare și ieșire etc.
Un studiu detaliat al interfețelor și magistralelor de sistem depășește scopul acestui curs. Prin urmare, vom lua în considerare aceste probleme numai din punctul de vedere al unei idei generale a organizării muncii. sistem cu microprocesorși principiile de interacțiune a dispozitivelor sale constitutive.
Principala modalitate de organizare a unui MPS este trunk-modular (Fig. 8.1): toate dispozitivele, inclusiv un microprocesor, sunt reprezentate ca module care sunt interconectate printr-o autostradă comună. Schimb de informatii pe portbagaj satisface cerinţele unor interfeţe comune stabilite pentru portbagaj de acest tip. Fiecare modul este conectat la magistrală prin circuite speciale de interfață.
Orez. 8.1.
Următoarele sarcini sunt atribuite circuitelor de interfață ale modulelor:
- asigurarea compatibilităţii funcţionale şi electrice a semnalelor şi protocoale de schimb module si sistem autostrada;
- conversia formatului de date intern al modulului în formatul de date al coloanei vertebrale a sistemului și invers;
- asigurarea percepției comenzilor unificate de schimb de informații și transformarea acestora într-o succesiune de semnale de control intern.
Aceste circuite de interfață pot fi destul de complexe. De obicei, acestea sunt implementate sub forma unui microprocesor specializat LSI. Se numesc astfel de scheme controlorii.
Controlori au un grad ridicat de autonomie, ceea ce permite funcționarea paralelă în timp perifericeși executarea programului de prelucrare a datelor de către microprocesor.
În plus, prin pre-buffering-ul de date, controlorii asigură redirecționarea pentru mai multe cuvinte situate la adrese consecutive simultan, ceea ce permite utilizarea așa-numitului „exploziv”
(burst) modul bus - 1 ciclu de adresă urmat de mai multe cicluri de date.
Dezavantajul modului trunk-modular de organizare a computerului este imposibilitatea interacțiunii simultane a mai mult de două module, ceea ce limitează performanţă calculator.
Interacțiunea microprocesorului cu memoria cu acces aleatoriu (RAM) și dispozitivele externe (VU) este ilustrată în fig. 8.2.

Orez. 8.2.
Microprocesorul generează adresa unui dispozitiv extern sau a unei celule RAM și generează semnale de control - fie IOR / IOW când este accesat pentru citire/scriere de pe un dispozitiv extern, sau MR/MW pentru citire/scriere din RAM.
Există doar 2 comenzi pentru schimbul de informații cu dispozitive externe în MP:
- comanda de intrare IN AX, DX scrie în registrul AX un număr de la un dispozitiv extern a cărui adresă se află în registrul DX; concomitent, este generat semnalul IOR (Intrare/Ieșire Citire).);
- comanda de ieșire OUT DX, AX emite informații din registrul AX către un dispozitiv extern a cărui adresă se află în registrul DX; aceasta generează semnalul IOW (Intrare/Ieșire Scriere).
Semnalele IOR/IOW sunt generate atunci când sunt executate numai aceste comenzi.
Formarea semnalelor MR / MW are loc în comenzile pentru care operandul și/sau receptorul rezultatului se află în RAM, de exemplu, ADD , AX .
În acest sens, există două modalități principale de organizare a spațiului de adrese sistem cu microprocesor:
- Cu spațiu de adrese comun dispozitive externe și RAM;
- cu spații de adrese independente.
În primul caz, porturile I/O pot fi accesate ca celule RAM. Avantajul acestei abordări este abilitatea de a utiliza diferite moduri de adresare atunci când accesați dispozitive externe, precum și de a efectua diverse operații aritmetice și logice asupra conținutului porturilor I/O. Dar, în același timp, acest lucru reduce capacitatea RAM-ului adresat și reduce securitatea sistemului, deoarece pierde protecțiile suplimentare asociate cu execuția comenzilor I/O (câmpul IOPL al registrului de steag nu funcționează). În plus, o încălcare a logicii programului (formarea unei adrese RAM incorecte) poate duce la o funcționare falsă a unui dispozitiv extern.
Dacă primul dezavantaj nu este atât de semnificativ cu volumele moderne dispozitive de stocare, apoi al doilea poate avea un impact foarte negativ asupra activității MPS. Posibilitatea de a utiliza moduri complexe de adresare la accesarea dispozitivelor externe pentru sisteme cu microprocesor bazate pe MP universale nu este atât de importantă. Prin urmare, în prezent, la construirea MPS, se acordă preferință celei de-a doua abordări.
Luați în considerare caracteristicile schimbului de informații între microprocesor și dispozitivele externe. O diagramă de sincronizare simplificată a acestui proces este prezentată în