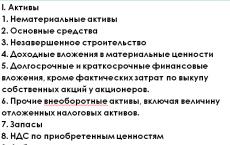
Vastuvõtt-edastus tüüpi metallidetektor. Lihtsaim metallidetektor. Kuidas oma kätega omatehtud metallidetektorit kokku panna
Seadet, mis võimaldab nende juhtivuse tõttu otsida neutraalses keskkonnas, näiteks maapinnal, asuvaid metallesemeid, nimetatakse metallidetektoriks (metallidetektoriks). See seade võimaldab leida metallesemeid erinevates keskkondades, sealhulgas inimkehas.
Suuresti tänu mikroelektroonika arengule on metallidetektoritel, mida toodavad paljud ettevõtted üle maailma, kõrge töökindlus ning väikesed üldised ja kaaluomadused.
Mitte nii kaua aega tagasi võis selliseid seadmeid kõige sagedamini näha sapööridega, kuid nüüd kasutavad neid päästjad, aardekütid, kommunaalteenuste töötajad torude, kaablite jms otsimisel. Lisaks kasutavad paljud "aardekütid" metallidetektoreid, mida nad oma kätega kokku panna.
Seadme konstruktsioon ja tööpõhimõte
Turul olevad metallidetektorid töötavad erinevatel põhimõtetel. Paljud usuvad, et nad kasutavad impulsskaja või radari põhimõtet. Nende erinevus lokaatoritest seisneb selles, et edastatavad ja vastuvõetud signaalid töötavad pidevalt ja samaaegselt, lisaks töötavad nad samadel sagedustel.
"Vastuvõtu-edastuse" põhimõttel töötavad seadmed registreerivad metallesemelt peegeldunud (taaskiirguse) signaali. See signaal ilmneb metallidetektori mähiste poolt tekitatava vahelduva magnetvälja löögi tõttu metallobjektile. See tähendab, et seda tüüpi seadmete konstruktsioon näeb ette kahe mähise olemasolu, millest esimene on edastav, teine vastuvõtt.
Selle klassi seadmetel on järgmised eelised:
- disaini lihtsus;
- suurepärane võime tuvastada metallmaterjale.
Samal ajal on selle klassi metallidetektoritel teatud puudused:
- metallidetektorid võivad olla tundlikud pinnase koostise suhtes, millest nad metallesemeid otsivad.
- tehnoloogilised raskused toote valmistamisel.
Teisisõnu tuleb seda tüüpi seadmed enne kasutamist käsitsi konfigureerida.
Teisi seadmeid nimetatakse mõnikord löögidetektoriks. See nimi pärineb kaugest minevikust, täpsemalt ajast, mil superheterodüünvastuvõtjaid laialdaselt kasutati. Löömine on nähtus, mis muutub märgatavaks kahe lähedase sagedusega ja võrdse amplituudiga signaali summeerimisel. Löömine seisneb summeeritud signaali amplituudi pulseerimises.
Signaali impulsi sagedus on võrdne summeeritud signaalide sageduste erinevusega. Lases sellist signaali läbi alaldi, nimetatakse seda ka detektoriks, eraldatakse nn erinevussagedus.
Sellist skeemi kasutati pikka aega, kuid tänapäeval seda enam ei kasutata. Need asendati sünkroondetektoritega, kuid termin jäi kasutusse.
Beat metallidetektor töötab järgmisel põhimõttel - see registreerib sageduste erinevuse kahe generaatori pooli pealt. Üks sagedus on stabiilne, teine sisaldab induktiivpooli.
Seade seadistatakse käsitsi nii, et genereeritud sagedused ühtivad või on vähemalt lähedased. Niipea, kui metall siseneb levialasse, muutuvad seatud parameetrid ja sagedus. Sageduste erinevust saab salvestada mitmel viisil, alates kõrvaklappidest kuni digitaalsete meetoditeni.
Selle klassi seadmeid iseloomustab lihtne anduri disain, madal tundlikkus mulla mineraalse koostise suhtes.
Kuid peale selle tuleb nende töötamise ajal arvestada asjaoluga, et neil on suur energiatarbimine.
Tüüpiline disain
Metallidetektori struktuur sisaldab järgmisi komponente:
- Mähis on kasti tüüpi, selles on signaali vastuvõtja ja saatja. Enamasti on mähis elliptilise kujuga ja selle valmistamiseks kasutatakse polümeere. Sellega on ühendatud juhe, mis ühendab selle juhtseadmega. See juhe edastab signaali vastuvõtjast juhtseadmesse. Saatja genereerib metalli tuvastamisel signaali, mis edastatakse vastuvõtjasse. Mähis on paigaldatud alumisele vardale.
- Metallist osa, millele mähis kinnitatakse ja selle kaldenurka reguleeritakse, nimetatakse alumiseks vardaks. Tänu sellele lahendusele toimub pinna põhjalikum uurimine. On mudeleid, mille alumine osa saab reguleerida metallidetektori kõrgust ja tagab teleskoopühenduse vardaga, mida nimetatakse keskmiseks.
- Keskmine võll on sõlm, mis asub alumise ja ülemise võlli vahel. Sellele on fikseeritud kinnitusvahendid, mis võimaldavad reguleerida seadme suurust. turult leiate mudeleid, mis koosnevad kahest vardast.
- Ülemine riba on tavaliselt kumer. See meenutab tähte S. Seda vormi peetakse optimaalseks käe külge kinnitamiseks. Sellele on paigaldatud käetugi, juhtseade ja käepide. Käetugi ja käepide on valmistatud polümeermaterjalidest.
- Metallidetektori juhtseade on vajalik mähiselt saadud andmete töötlemiseks. Pärast signaali teisendamist saadetakse see kõrvaklappidesse või muudesse indikaatoritesse. Lisaks on juhtplokk mõeldud seadme töörežiimi reguleerimiseks. Mähise traat ühendatakse kiirvabastusseadme abil.
Kõik metallidetektori komplektis olevad seadmed on veekindlad.
See on disaini suhteline lihtsus ja võimaldab teil oma kätega metallidetektoreid valmistada.
Erinevad metallidetektorid
Turg pakub laias valikus metallidetektoreid, mida kasutatakse paljudes valdkondades. Allpool on loend, mis näitab mõningaid nende seadmete sorte:
Enamik kaasaegseid metallidetektoreid suudavad leida metallesemeid kuni 2,5 m sügavuselt, spetsiaalsed sügavtooted suudavad tuvastada toote kuni 6 meetri sügavuselt.
Töösagedus
Teine parameeter on töösagedus. Asi on selles, et madalad sagedused võimaldavad metallidetektoril näha üsna suurele sügavusele, kuid nad ei suuda näha väikseid detaile. Kõrged sagedused võimaldavad märgata väikseid objekte, kuid ei võimalda vaadata maapinda väga sügavale.
Lihtsamad (eelarve)mudelid töötavad ühel sagedusel, keskmisesse hinnatasemesse kuuluvad mudelid kasutavad töös 2 või enamat sagedust. On mudeleid, mis kasutavad otsimisel 28 sagedust.
Kaasaegsed metallidetektorid on varustatud sellise funktsiooniga nagu metallide eristamine. See võimaldab teil eristada sügavuses asuvat materjali tüüpi. Samal ajal kostub musta metalli tuvastamisel otsija kõrvaklappidest üks heli, värvilise metalli tuvastamisel teine.
Selliseid seadmeid nimetatakse impulss tasakaalustatud seadmeteks. Nad kasutavad oma töös 8–15 kHz sagedusi. Allikana kasutatakse 9-12 V patareisid.
Selle klassi seadmed suudavad tuvastada kuldobjekti mitmekümne sentimeetri sügavuselt ja mustmetallist tooteid umbes 1 meetri sügavuselt või rohkemgi.
Kuid loomulikult sõltuvad need parameetrid seadme mudelist.
Kuidas oma kätega omatehtud metallidetektorit kokku panna
Turul on palju seadmete mudeleid metalli otsimiseks maapinnast, seintest jne. Vaatamata välisele keerukusele pole metallidetektori valmistamine oma kätega nii keeruline ja sellega saab hakkama peaaegu igaüks. Nagu eespool märgitud, koosneb iga metallidetektor järgmistest põhikomponentidest - mähis, dekooder ja toiteallika signaalimisseade.
Sellise metallidetektori oma kätega kokkupanemiseks vajate järgmist elementide komplekti:
- kontroller;
- resonaator;
- erinevat tüüpi kondensaatorid, sealhulgas kilekondensaatorid;
- takistid;
- heli tekitaja;
- Pinge regulaator.
Lihtsaim isetehtav metallidetektor
Metallidetektori ahel pole keeruline ja selle leiate kas ülemaailmse võrgu avarustest või erialakirjandusest. Ülal on loetelu raadioelementidest, mis on kasulikud metallidetektori kodus oma kätega kokkupanemiseks. Lihtsa metallidetektori saab kokku panna käsitsi, kasutades jootekolbi või muud ligipääsetav viis. Peaasi, et osad ei tohiks puudutada seadme korpust. Kokkupandud metallidetektori töö tagamiseks kasutatakse 9-12 volti toiteallikaid.
Mähise kerimiseks kasutatakse traati ristlõike läbimõõduga 0,3 mm, see sõltub muidugi valitud vooluringist. Muide, haavamähis peab olema kaitstud kõrvalise kiirguse mõjude eest. Selleks sõelutakse see oma kätega tavalise toidufooliumi abil.
Kontrolleri välgutamiseks kasutatakse spetsiaalseid programme, mida võib leida ka Internetist.
Metallidetektor ilma kiipideta
Kui algajal "aardejahil" pole soovi mikroskeemidega tegeleda, on skeeme ka ilma nendeta.
Neid on rohkemgi lihtsad vooluringid põhineb traditsiooniliste transistoride kasutamisel. Selline seade võib leida metalli mitmekümne sentimeetri sügavuselt.
Sügavmetallidetektoreid kasutatakse metallide otsimiseks suurel sügavusel. Kuid väärib märkimist, et need pole odavad ja seetõttu on see täiesti võimalik oma kätega kokku panna. Kuid enne selle valmistamise alustamist peate mõistma, kuidas tüüpiline vooluring töötab.
Süvametallidetektori skeem ei ole kõige lihtsam ja selle teostamiseks on mitu võimalust. Enne selle kokkupanemist on vaja ette valmistada järgmine osade ja elementide komplekt:
- kondensaatorid erinevat tüüpi- kile, keraamika jne;
- erineva võimsusega takistid;
- pooljuhid - transistorid ja dioodid.
Nominaalsed parameetrid, kogus sõltuvad valitud elektriskeem seade. Ülaltoodud elementide kokkupanemiseks vajate jootekolvi, tööriistakomplekti (kruvikeeraja, tangid, traadilõikurid jne), materjali plaadi valmistamiseks.
Süvametallidetektori kokkupanemise protsess on ligikaudu järgmine. Esiteks pannakse kokku juhtplokk, mille aluseks on trükkplaat. See on valmistatud tekstoliidist. Seejärel kantakse montaažiskeem otse valmis plaadi pinnale. Pärast joonise ülekandmist tuleb tahvel söövitada. Selleks kasutage lahust, mis sisaldab vesinikperoksiidi, soola, elektrolüüti.
Pärast plaadi söövitamist tuleb sellele teha vooluringi komponentide paigaldamiseks augud. Pärast plaadi tinatamist. Kõige olulisem samm on tulemas. Osade ise paigaldamine ja jootmine ettevalmistatud plaadile.
Mähise kerimiseks oma kätega kasutage PEV kaubamärgi traati läbimõõduga 0,5 mm. Pöörete arv ja pooli läbimõõt sõltub süvametallidetektori valitud skeemist.
Natuke nutitelefonidest
Arvatakse, et nutitelefonist on metallidetektori valmistamine täiesti võimalik. See ei ole tõsi! Jah, on rakendusi, mis installitakse Android OS-i alla.
Kuid tegelikult suudab ta pärast sellise rakenduse installimist tõesti leida metallesemeid, kuid ainult eelnevalt magnetiseeritud. Ta ei saa metalle otsida ja pealegi diskrimineerida.
Nad suudavad töötada stabiilselt, kui minutis liigub kümneid inimesi. Tavaliselt on statsionaarsete metallidetektorite läbipääsu mõõtmed kuni 2 m kõrgused, laiused kuni 1 m. Seega on METOR 200 HS metallidetektori läbipääsu mõõtmed 2010 x 710 x 594 mm (joonis 1).
Kaasaegsed statsionaarsed metallidetektorid on varustatud mikroprotsessoritega, mis seavad töörežiimid (saab määrata teatud metallide tuvastamise, eseme massi jne) ja näidu (tavaliselt on neil valgus-, helinäidik, andmeväljundid seadmesse). väljapanek), loe läbi sõitjate arv, määrake metallesemete kandmise külg ja tsoon, teostage automaatne enesekontroll jne. Saate seadistada seadme tuvastama žiletitera, kuid mitte alumiiniumist õllepurki või peotäit münte. Mõned metallidetektorid on varustatud kaugjuhtimispuldidega, et juhtida ja kuvada nende töö tulemusi. Sellise kaugjuhtimispuldina saab kasutada arvutit.
Näiteks statsionaarses metallidetektoris Intelliscan 12000 (joonis 2) on kaarealune ruum jagatud 18 sõltumatuks tuvastamistsooniks – 6 horisontaalset ja 3 vertikaalset. Metallesemete kandmisel ekraanil, mis näitab inimkeha kontuuri, kuvatakse nende objektide lokaliseerimise tsoonid.
Riis. 1. Statsionaarne metallidetektor METOR 200 HS

Riis. 2. Statsionaarne metallidetektor Intelliscan 12000 koos ekraaniga
Metallidetektoril Intelliscan 12000 on järgmised omadused:
20 programmi metallesemete selektiivseks tuvastamiseks;
99 tundlikkuse taset mis tahes programmiga töötamisel;
häiresignaalid igas tsoonis genereeritakse juhul, kui metallesemete mõõtmed ületavad määratud;
tsoonipõhine tundlikkuse seadistus vahemikus -99% kuni + 99% baasi suhtes;
alumiste tsoonide reguleerimine, et kompenseerida metallist tugevduse mõju põrandale;
automaatne testimine ja automaatne kalibreerimine;
mürast lahtihäälestus digitaalse filtreerimise abil;
püsioleku kuvamine värviekraanil;
paigaldiste kaitsmine väliste häirete eest kuuekohalise pääsukoodiga;
kasutaja poolt valitud töösageduste arv - 16;
Vastab kõigile 1991. aasta USA föderaalse lennuameti nõuetele lennujaama rakenduste ja standardite kohta Riiklik Instituutõiglus NILECJ (USA);
vastavus Vene Föderatsiooni tervishoiuministeeriumi hügieenitunnistusele 77.01.09.346.P.10046.04.0.
Võimalused on statsionaarsetele metallidetektoritele, mis töötavad patareidega, töötavad põllul mitmekümne kraadise miinuskraadi juures.
3. Metallidetektorid "vastuvõtu-edastuse" põhimõttel
Seda tüüpi metallidetektorite tööpõhimõte põhineb uuritava objekti (sihtmärgi) eksponeerimisel saatva (kiirgava) pooli vahelduvale magnetväljale ja metallis pöörisvoolude induktsiooni tulemusena tekkiva signaali salvestamisel. objekt (sihtmärk). Seega kuuluvad need asukohatüüpi seadmete hulka ning neil peab olema vähemalt kaks mähist – edastav (emitsioon) ja vastuvõtt.Võõrterminoloogias nimetatakse sellel põhimõttel töötavaid metallidetektoreid sageli IB (Induction Balance) või VLF – (Very Madal sagedus).
Nii edastatud kui ka vastuvõetud signaalid on pidevad ja langevad sageduselt kokku.
Seda tüüpi metallidetektorite põhipunktiks on poolide vastastikuse paigutuse valik. Need peavad asuma nii, et võõrkehade puudumisel indutseerib saatepooli magnetväli vastuvõtupoolis nullsignaali.
Joonisel 3 a) ja b) on kujutatud risti ja ristuvate telgedega poolide paigutust, mille puhul vastuvõtvas mähises vooluinduktsioon puudub. Joonisel fig. 3 c) kujutab süsteemi ühest kiirgavast (keskel) ja kahest vastuvõtupoolist. Viimased lülitatakse loendurile kiirgava mähise poolt indutseeritud signaaliga ja metallesemete puudumisel nende väljundis on kogu emf. võrdub nulliga.

Riis. 3. Mähiste asukoht, milles juhtnööre pole
voolud vastuvõtupoolis
Mähised, mis kiirgavad kiirgust ja/või võtavad vastu signaali, on valmistatud mingi kujunduse kujul, mida nimetatakse otsinguraamiks. Poolide paralleelset paigutust nimetatakse koplanaarseks (joonis 4). Selline mähiste paigutus võimaldab otsinguraami mõõtmeid vähendada, kuna seda saab teha tasapinnalises ("pannkoogi" kujul) kaitseümbrises.

Riis. 4. Poolide tasapinnalise paigutuse variandid
Mähiste paigutamiseks samale tasapinnale on mitu võimalust, pakkudes vastuvõtupoolis nullsignaali. Pooli saab asetada üksteise peale nii, et magnetilise induktsiooni vektori koguvoog läbi vastuvõtupooli tasapinna on võrdne nulliga (joonis 4 a). Riis. 4 b) illustreerib meetodit, kui vastuvõtupool "joonise kaheksa" kujul asetatakse kiirgava mähisesse. Samal ajal indutseeritakse emfid "kaheksa" erinevatesse pooledesse. alates erinevad märgid ja kompenseerivad üksteist. Väljalaskva pooli sisse on võimalik paigutada tavapärasel kujul vastuvõtupool, kuid siis kasutatakse spetsiaalset kompensatsiooniseadet.
Tavaliselt moodustavad seda tüüpi metallidetektorites otsinguraami kaks samas tasapinnas paiknevat mähist, mis on tasakaalustatud nii, et kui saatemähisele suunatakse signaal, on vastuvõtupooli väljundis minimaalne signaal. Kiirguse töösagedus on üks kuni mitukümmend kHz.
Mõelge "vastuvõtu-edastuse" põhimõttel töötava metallidetektori struktuuriskeemi ühele variandile (joon. 5).
Generaator loob vahelduvpinge (ristkülikukujuline või siinuskujuline), mis juhitakse läbi võimsusvõimendi kiirgavasse mähisesse.

Riis. viis. Funktsionaalne diagramm metallidetektor,
töötab põhimõttel "vastuvõtt-edastus"
Kui metallidetektori lähedusse ilmub metallist sihtmärk, indutseeritakse selles kiirgavast mähisest voolud, mis põhjustavad sekundaarse elektromagnetilise kiirguse ilmnemist. Viimane mõjub vastuvõtupoolile ja selles indutseeritakse muutuv emf. (Pinge). Indutseeritud signaali sagedus on sama, mis kiirgaval poolil.
Vastuvõtupoolis indutseeritud signaalil on teatav faasinihe emiteeriva mähise signaali suhtes, kuna see saabub vastuvõtupoolile teatud viivitusega. Kui otsinguraami lähedale ilmub metallese, suureneb signaali amplituud vastuvõtupoolis ja faasinihe muutub sõltuvalt metalli juhtivusest (must, värviline).
Sünkroondetektor eraldab vastuvõtva võimendi väljundist tuleva kasuliku vahelduva signaali, mis tekib metalleseme kiirguse toimel, konstantseks signaaliks. Selle töö sünkroniseerimine kiirgava signaali allika (generaatori) tööga võimaldab suurendada selle töö efektiivsust müra ja häirete taustal, mis ületavad oluliselt kasuliku signaali amplituudi.
Sünkroondetektori väljundsignaali võimendatakse ja suunatakse indikaatorisse, näiteks heli või valgusse, mis annab märku metalleseme ilmumisest metallidetektori lähedusse.
Näit lülitatakse sisse ainult signaalide puhul, mis ületavad teatud amplituudi läve. Seega nõrgad signaalid, mis on peamiselt seotud metallidetektori liikumise ja väliste elektromagnetiliste häiretega, indikaatorit ei käivita.
Metallidetektor on väga ahvatlev seade, seda saab kasutada erinevatel eesmärkidel, näiteks vanade juhtmete otsimiseks, veetorud, noh ja lõpuks aare. Metallidetektori mõiste on väga lai, metallidetektorid ise on erinevad, klassikalistes metallidetektorites sätestatud metalliotsingu põhimõtet kasutatakse mitmesugustes seadmetes alates lihtsatest detektoritest kuni radarijaamadeni.
IN Hiljuti suurt populaarsust koguvad nn impulssmetallidetektorid, mis sisaldavad ainult ühte mähist ja millel on suhteliselt lihtne disain, pakkudes samas üsna head tundlikkust ja kõrget töökindlust. Impulss-metallidetektor töötab vastuvõtmise ja edastamise põhimõttel, sellises metallidetektoris olev otsingupool võib töötada kahes režiimis - vastuvõtmise ja edastamise. Mähise poolt väljastatav signaal tekitab või ergastab metallis pöörisvoolusid, mille mähis ise üles võtab.
Erinevatel metallidel on erinev elektrijuhtivus ja paljud metallidetektorid suudavad seda üsna suure täpsusega ära tunda, määrates kindlaks, mis metalli maa sees on.
Ülaltoodud metallidetektori skeem on võrgus väga levinud, kuid tõelistest kujundustest ja ülevaadetest on väga vähe fotosid, mistõttu otsustati skeemi korrata ja praktikas proovida.
Trükkplaat osutus üsna kompaktseks, see valmistati loot-meetodil.

Skeemil on palju eeliseid:
- ainult ühe mähise olemasolu;
- äärmiselt lihtne ja mitte kapriisne skeem, mis praktiliselt ei vaja täiendavaid seadistusi;
- kogu ahel on ehitatud ainult ühele kiibile;
- madal tundlikkus maapinna suhtes;
- soovi korral saab metallidetektorit seadistada nii, et see näeb ainult värvilisi metalle ja ignoreerib musti, st. mingi metalli diskrimineerimise funktsioon.
Puudustest:
- madal otsingusügavus - detektor märkab suuri metallesemeid kuni 30 cm kaugusel, keskmisi münte kuni 5 ja 8 cm kaugusel.
Sellest ei piisa, aga olenevalt otstarbest, milleks... Näiteks vanade veetorude otsimiseks seinast tuleb skeem 100% toime.
Ahel on üles ehitatud ühele CD4011 CMOS-kiibile, mis sisaldab 4 loogikat 2I-NOT. See koosneb 4 osast, võrdlus- ja otsinguostsillaatoritest, mikserist ja signaalivõimendist, mis on valmistatud ühele transistorile. Dünaamilise peana on eelistatav kasutada kõrvaklappe, mille takistus on 16 kuni 64 oomi, sest. väljundaste ei ole mõeldud väikese takistusega koormustele.




Metallidetektor töötab järgmiselt. Algselt on otsingu- ja referentsostsillaatorid seatud samale sagedusele, nii et me ei kuule kõlarist midagi. Võrdlusostsillaatori sagedus on fikseeritud käsitsi reguleerimise võimalusega muutuva takisti pööramisega. Otsingugeneraatori sagedus sõltub suuresti LC-ahela parameetritest. Kui otsimähise vaatevälja ilmub metallese, on LC-ahela sagedus häiritud, mille tulemusena muutub otsingugeneraatori sagedus võrdlusaluse suhtes. Mikser eraldab nende generaatorite sageduste erinevuse, mis helisignaali kujul filtreeritakse ja suunatakse võimendi astmesse, mille koormus on kuular.
Mähis
Mida suurem on pooli läbimõõt, seda tundlikum on metallidetektor, kuid suurtel mähistel on omad puudused, seega tuleb valida optimaalsed parameetrid. Selle vooluringi jaoks on kõige optimaalsem läbimõõt vahemikus 15–20 cm, traadi läbimõõt on 0,4–0,6 mm, keerdude arv on 40–50, kui pooli läbimõõt on 20 cm. Minu puhul on mähis trimmitud, pöörded ja läbimõõt on väiksemad kui vaja, seega pole ahela tundlikkus nii kuum. Kui kavatsete metallidetektorit kasutada tingimustes kõrge õhuniiskus, spiraal peab olema tihendatud.




Seadistamine
Kõik reguleerimistööd tehakse metalli puudumisel mähise vaateväljas!
Kui esimesel ühendamisel vooluahel metallile ei reageeri, aga kõik komponendid on korras, siis suure tõenäosusega jääb sageduste erinevus generaatoritest väljapoole helivahemikku ja heli lihtsalt inimene ei taju. Sel juhul tasub muutuvtakistit keerata kuni helisignaali ilmumiseni. Järgmisena keerame aeglaselt sama takistit, kuni kuuleme kõlarist madala sagedusega signaali, seejärel keerame seda veel veidi samas suunas, kuni signaal täielikult kaob. See lõpetab seadistamise.
Peenemaks häälestamiseks soovitan kasutada mitme pöördega takistit või kahte tavalist muutujat, millest üks on jämedaks ja teine sujuvamaks häälestamiseks. Pärast seadistamist kontrollime metallidetektorit, viies selle mähise külge metalleseme ja veendume, et helisignaali toon muutub ehk vooluahel reageerib metallile.
Metalli eristamise mõju täheldatakse, kui mõlemad generaatorid töötavad sagedusel umbes 130–135 kHz, samas kui mustmetallide suhtes tundlikkus peaaegu puudub.
Ahelat saab toita konstantsest allikast pingega 3–15 volti, parim võimalus on kasutada 9-voldist 6F22 akut, vooluahela voolutarve on sel juhul vahemikus 15–30 mA , olenevalt koormustakistusest.




B. SOLONENKO, Genitšesk, Hersoni oblast, Ukraina
Poleks liialdus öelda, et metallidetektorid tõmbavad alati raadioamatööride tähelepanu. Paljud sellised seadmed on avaldatud ajakirjas "Raadio". Täna pakume lugejatele veel ühe Noortehnikute Tehnikajaama raadiotehnika ringis loodud kavandi kirjeldust (vt selleteemalist artiklit Raadios, 2005, nr 4, 5). Ringi liikmed said ülesandeks välja töötada kergesti valmistatav ligipääsetaval elementalusel põhinev seade, mille rajamiseks piisab ühest multimeetrist. Kui hästi poistel see õnnestus, saate hinnata teie, lugejad.
Kavandatav metallidetektor töötab "edastus-vastuvõtu" põhimõttel. Saatjana kasutati multivibraatorit, vastuvõtjana helisagedusvõimendit (34). Neist esimese seadme väljundiga ja teise sisendiga on ühendatud sama suuruse ja mähise andmetega mähised,
Et sellise saatja ja vastuvõtja süsteemist saaks metallidetektor, peavad nende mähised olema paigutatud nii, et võõrkehade puudumisel poleks nende vahel praktiliselt mingit ühendust, st saatja signaal ei läheks otse. vastuvõtjale. Nagu teate, on mähiste vaheline induktiivne side minimaalne, kui nende teljed on üksteisega risti. Kui saatja ja vastuvõtja mähised on nii paigutatud, siis saatja signaali vastuvõtjas ei kuule. Kui selle tasakaalustatud süsteemi lähedusse ilmub vahelduva mõjul metallese magnetväli Saatemähises tekivad niinimetatud pöörisvoolud ja sellest tulenevalt oma magnetväli, mis indutseerib vastuvõtupoolis vahelduva EMF-i. Vastuvõtja poolt vastuvõetud signaali muudavad telefonid heliks. Selle maht sõltub objekti suurusest ja kaugusest selleni.
Metallidetektori tehnilised andmed: töösagedus - umbes 2 kHz; 25 mm läbimõõduga mündi tuvastamise sügavus - umbes 9 cm; rauast ja alumiiniumist õmbluskorgid - vastavalt 23 ja 25 cm; teras- ja alumiiniumlehed mõõtmetega 200x300 mm - 40 ja 45 cm; kaevukaev- 60 cm.
Saatja. Saatja ahel on näidatud joonisel fig. 1. Nagu mainitud, on see sümmeetriline multivibraator, mis põhineb transistoridel VT1, VT2. Selle tekitatavate võnkumiste sageduse määrab kondensaatorite CI, C2 mahtuvus ja takistite R2, R3 takistus. Transistori VT2 - takisti R4 - kollektori koormuse signaal 34 juhitakse lahtisidestuskondensaatori C3 kaudu mähisele L1, mis muundab elektrilised võnked vahelduvaks magnetväljaks AF.

Joonis 2
Vastuvõtja on kolmeastmeline võimendi 34, mis on valmistatud vastavalt joonisel fig. 2. Selle sisendisse on ühendatud sama L1 mähis, mis saatjas. Võimendi väljund on koormatud järjestikku ühendatud telefonidega BF1.1, BF1.2.

Joonis 3
Vastuvõtja poolile mõjub metallesemesse indutseeritud saatja vahelduv magnetväli, mille tulemusena elektrit sagedus umbes 2 kHz. Eralduskondensaatori C1 kaudu juhitakse signaal võimendi esimese astme sisendisse, mis on valmistatud transistoril VT1. Selle koormusest - takistist R2 - tulev võimendatud signaal juhitakse läbi lahtisidestuskondensaatori C3 teise astme sisendisse, mis on kokku pandud transistorile VT2. Signaal selle kollektorist läbi kondensaatori C5 juhitakse kolmanda astme sisendisse - transistori VT3 emitteri järgijasse. See võimendab voolusignaali ja võimaldab ühendada väikese oomiga telefone koormana.
Temperatuuri mõju vähendamiseks keskkond võimendi stabiilsuse osas viidi esimesse ja teise astmesse alalispinge negatiivne tagasiside, lülitades sisse takisti R1 kollektori ja transistori VT1 aluse vahel ning takisti R3 kollektori ja aluse VT2 vahel. Võimenduse vähendamine sagedustel alla 2 kHz saavutatakse eralduskondensaatorite C1, C3 mahtuvuse sobiva valikuga sellest sagedusest kõrgematel sagedustel - sagedusest sõltuva negatiivse sisestamisega esimesse ja teise astmesse. tagasisidet vahelduvpinge abil läbi kondensaatorite C2 ja C4. Need meetmed võimaldasid suurendada vastuvõtja mürakindlust. Kondensaator C6 ei lase võimendil ise ergastuda, kui aku sisetakistus selle tühjenemisel suureneb.

Joonis 4
Detailid ja disain. Saatja ja vastuvõtja andmed asuvad aadressil trükkplaadid ah, tehtud ühepoolsest fooliumkattega klaaskiust toorikutele isoleerivate radade lõikamisega. Saatja plaadi joonis on näidatud joonisel fig. 3, vastuvõtja - joonisel fig. 4. Plaadid on mõeldud MLT takistite võimsusega 0,125 või 0,25 W ja kondensaatorite K73-5 (vastuvõtjas C2, C4) ja K73-17 teiste kasutamiseks. Oksiidkondensaator C6 vastuvõtjas - K50-35 või sarnane välismaise toodang. Diagrammil näidatud asemel saate saatjas kasutada mis tahes muid KT503-seeria transistore ja vastuvõtjas - KT315-seeria transistore mis tahes täheindeksiga või KT3102-seeria transistore. indeksid A-B. Eelistatav on viimaste kasutamine, kuna neil on madalam müratase ja võimendi müra varjab väikeste objektide signaali vähem. Lülitid SA1 võivad olla mis tahes disainiga, kuid eelistatavalt väiksemad. Telefonid BF1, BF2 - väike sisestus, näiteks helipleierist.
Vastuvõtja ja saatja mähised, nagu juba mainitud, on samad. Need on tehtud nii. Ristküliku mõõtmetega 115x75 mm nurkadesse lüüakse plaadi sisse neli naela läbimõõduga 2 ... 2,5 ja pikkusega 50 ... 60 mm, pärast nende paigaldamist PVC- või polüetüleentorud 30 ... 40 mm pikk. Sel viisil isoleeritud naeltele keritakse 300 keerdu PEV-2 traati läbimõõduga 0,12 ... 0,14 mm. Pärast mähise lõpetamist mähitakse pöörded kogu perimeetri ümber kitsa isoleerlindi ribaga, mille järel painutatakse kaks kõrvuti asetsevat naela ristküliku keskkoha suunas ja mähis eemaldatakse.
Vastuvõtja ja saatja korpustena on kasutusel polüstüreenist nööpkarbid (sisemõõdud - 120x80 mm). Akupesad, PCB-riiulid ja mähise kinnitused on valmistatud samast materjalist ja liimitud korpuste külge lahustiga P-647 (võib kasutada ka P-650). Osade asukoht saatja korpuses on näidatud joonisel fig. 5 on sarnaselt paigutatud vastuvõtja detailid.

Joonis 5
Kõik vastuvõtja ja saatja poolide sees asuvad metallkonstruktsioonielemendid (toiteaku, osaplaat, toitelüliti) mõjutavad nende magnetvälja. Et välistada nende asendi võimalik muutumine töötamise ajal, peavad need kõik olema kindlalt kinnitatud. See kehtib eriti Krona aku kui vahetatava konstruktsioonielemendi kohta.
Asutamine. Saatja töö kontrollimiseks ühenda L1 mähise asemel telefonid ja veendu, et toite sisselülitamisel kostaks telefonidesse heli. Seejärel, kui mähis on paigas, kontrollitakse saatja tarbitavat voolu, see peab jääma vahemikku 5 ... 7 mA.
Vastuvõtja on häälestatud sisendiga lühises. Valides esimeses astmes takisti R1 ja teises astmes R3, seatakse transistoride VT1 ja VT2 kollektoritele pinge, mis võrdub ligikaudu poolega toitepingest. Seejärel, valides takisti R5, tagavad nad, et transistori VT3 kollektori vool muutub võrdseks 5 ... 7 mA. Pärast seda, pärast sisendi avamist, ühendage sellega L1 vastuvõtja mähis ja saades saatja signaali umbes 1 m kauguselt, veenduge, et süsteem tervikuna töötab.
Enne sõlmede kokkupanemist üheks struktuuriks on mõttekas läbi viia mitu katset. Pärast saatja ja vastuvõtja paigaldamist lauale vertikaalselt 1 m kaugusele (nii, et mähiste teljed tunduvad üksteisega jätkuvat) ja kontrollides telefonides signaali taset, pöörake vastuvõtjat aeglaselt ümber vertikaaltelje. asendisse, kus poolide tasandid on üksteisega risti. Sel juhul signaal kõigepealt aeglaselt väheneb, seejärel kaob täielikult ja edasise pöörlemise korral hakkab see suurenema. Tehke katse mitu korda, et metallidetektori kokkupanemisel ja reguleerimisel oleks lihtne määrata vastuvõtja minimaalset signaali.

Joonis 6
Seejärel asetage saatja vertikaalselt lauale, mis ei sisalda metallist konstruktsioonielemente ja sellest 10 cm kaugusele, vastuvõtja horisontaalselt alusele (ühele või mitmele raamatule) nii, et vastuvõtja pooli tasapind oleks risti saatja pooli tasapinnaga ja on selle keskpunktist veidi allpool. Telefonides signaali taset jälgides tõstke vastuvõtja saatja poole jääv külg ja laske signaal langeda. Valides vastuvõtja ja aluse vahel tihendid, leidke selle asukoht, mille juures paberpostkaardilt tehtud tihendi vähimgi liigutus võimaldab seada vastuvõtjas minimaalse signaali, mis vastab metallidetektori maksimaalsele tundlikkusele.
Tuues metallidetektori levialasse vaheldumisi tinast ja alumiiniumist õmbluskatteid, veendu, et metallidetektori maksimaalse tundlikkuse tsoon paikneks vastuvõtja pooli all ja kohal (vastuvõtja ja saatja poolide magnetväljad on sümmeetrilised). Pöörake tähelepanu asjaolule, et metallidetektor reageerib erinevalt erinevast metallist valmistatud sama suurusega katetele.
Kui mähiste minimaalse ühendamise korral kostub signaal veidi ja kui kate on ühele küljele sisestatud, siis see kõigepealt väheneb, kuni see täielikult kaob, ja seejärel hakkab kasvama ja kui see sisestatakse teisele küljele, see suureneb ilma languseta, siis näitab see kas vastuvõtja või saatja magnetpooli väljade ebatäpset seadistust või moonutust. Samas viitab see asjaolu sellele, et täiendava metalleseme kasutuselevõtuga on võimalik süsteemi reguleerida seni, kuni signaal minimaalselt täielikult kaob, st saavutada seadme maksimaalne tundlikkus. Kui õmbluskorgi sisestamisel kaob signaal täielikult 15...20 cm kauguselt, siis metallidetektori väljale väiksema eseme viimisega saab sama efekti ka vastuvõtja või saatja korpusele asetades. . Autori versioonis osutus selliseks esemeks kollasest metallist valmistatud 25 mm läbimõõduga münt (sarnane efekt saavutatakse sarnase suurusega alumiiniumplaadi kasutuselevõtul). Seal oli kolm kohta, kus münt täitis talle määratud ülesannet: alt saatja alt, vastuvõtja alt aku juurest ning käepidemel vastuvõtja ja saatja vahel.
Kokkupanek. Seadme autoriversiooni kujundus lihtsustatud kujul on näidatud joonisel fig. 6, a välimus- joonisel fig. 7. Kandursiin 2 (vt joonis 6) ja käepide 3 on valmistatud puidust. Käepideme ülemine osa on kasutamise hõlbustamiseks plastikuga üle kleebitud ning alumine osa sisestatakse siinis olevasse eelnevalt tehtud auku ja kinnitatakse liimiga. Pärast kokkupanekut lakitakse käepideme 3 puitosa ja kandursiin 2 niiskuse eest kaitsmiseks. Käepideme ülaosas on telefonipesa 4, mis on paarikaupa keerutatud juhtmetega ühendatud vastuvõtjaga.
Koostamise ajal kinnitatakse saatja 1 jäigalt kanduriinile 2 selliselt, et selle teises otsas asuv vastuvõtja 7 on veidi allpool vastuvõetud signaali miinimumile vastavat joont. Seejärel valige tihendi 5 paksus (mis tahes isolatsioonimaterjalist), kuni vastuvõetud signaali miinimum on hõlpsasti seadistatav, liigutades reguleerimisplaati 6. Pärast seda kinnitatakse vastuvõtja 7 kahe kruviga kanduriini 2 külge. Kanduriini 2 servas olev kruvi keeratakse kinni, kuni see peatub, ja teine (ligikaudu korpuse alumise seina keskel) ei ole 1 ... 2 mm võrra sisse keeratud. See välistab vastuvõtja liikumise horisontaaltasapinnas ja võimaldab samal ajal libistada reguleerimisplaadi 6 selle korpuse alla, tõstes vastuvõtja serva üles. Seda vertikaaltasapinnal sel viisil liigutades saavutatakse vastuvõetud signaali miinimum. Pärast lõplikku kokkupanekut täpsustatakse ja liimitakse kompensatsiooniobjekti asukoht.
Metallidetektori tööpõhimõte
Metallidetektori tööpõhimõte
Nagu teate, on metallidetektor võimeline tuvastama metallesemete olemasolu ilma nendega kokku puutumata. Operaatorit teavitatakse metalli olemasolust spetsiaalsete signaalide abil: heli, noole liikumine, indikaatori väärtuste muutused jne.
Sõltuvalt tööpõhimõttest võib eristada järgmist tüüpi metallidetektoreid:
1. Elektroonilise sagedusmõõturiga metallidetektor
Sellise metallidetektori tööpõhimõte põhineb mõõtegeneraatori sageduse hindamisel elektroonilise sagedusmõõturi abil, kui andur ise on sihtmärgist veel kaugel. Saadud väärtuse "jätab" register meelde. Pärast seda, huvipakkuvate objektide otsimise protsessis, tegeleb elektrooniline sagedusmõõtur pideva vastuvõtugeneraatori sageduse mõõtmisega. Võrdlussageduse indeks lahutatakse saadud andmetest ja tulemus kuvatakse ekraanil.
Elektroonilise sagedusmõõturiga metallidetektori skeem
2. Beat metallidetektor
Löökidel metallidetektori tööpõhimõte põhineb kahe generaatori sageduste erinevuse kombinatsioonil. Üks neist generaatoritest on stabiilse sagedusega ja teine sisaldab andurit, mis on induktiivpool. Kui metallidetektori läheduses metallesemeid ei asu, on seadme generaatorite sagedusväärtused praktiliselt samad. Metalli olemasolu anduri läheduses põhjustab generaatori sageduse järsu muutuse.

Metallidetektori skeem löökide peal
Sageduse erinevuse registreerimine võib toimuda mitmel viisil. Lihtsaim viis on kuulata signaali kõrvaklappide või valjuhääldi abil. Sageli kasutatakse ka digitaalseid meetodeid sageduse kõikumiste mõõtmiseks.
3. "edastus-vastuvõtu" põhimõttega metallidetektorid
Sellise metallidetektori tööpõhimõte on registreerida signaal, mis peegeldub metallesemelt. Peegeldunud signaali tekkimine on seadme pooli muutuva vooga magnetvälja toime tulemus sihtmärgile (metallobjektile). Samal ajal sisaldab seadme struktuur vähemalt kahte mähist, millest üks "vastutab" signaali edastamise ja teine selle vastuvõtu eest.

Metallidetektori "edastus-vastuvõtt" töö põhineb mähiste teatud vastastikusel paigutusel, välistades ühe mõju teisele. Seega, kui võõraid metallesemeid pole, indutseerib kiirgav mähis vastuvõtvale süsteemile nullsignaali. Metallesemete ilmumine mähiste lähedale toob kaasa spetsiaalse signaali.
4. Ühe mähise induktsiooniga metallidetektor
Selle seadme anduri disain sisaldab ainult ühte mähist, mis jälgib sageduse muutusi. Kui sihtmärk ilmub metallidetektori lähedale, tekib peegeldunud signaal. Mähises on see "indutseeritud" täiendava elektrilise signaaliga. Operaator peab ainult selle signaali isoleerima. Peegeldunud signaali saate registreerida, arvutades mähises oleva elektriindikaatori järgi sarnase faasi, sageduse, amplituudiga signaali, mida täheldati metalli puudumisel.
Üldiselt ühendab ühe mähise induktsiooniga metallidetektor löögil töötavate seadmete omadused "edastus-vastuvõtu" põhimõttel olevate seadmetega. Seega iseloomustab ühe mähisega metallidetektorit kõrge tundlikkus ja lihtne disain.

5. Pulss metallidetektor
Pulssmetallidetektorit iseloomustab kõrge tundlikkus ja sellega saab otsida erinevaid objekte ka suurel sügavusel. Sellise metallidetektori töö põhineb ajutisel kiirgus- ja peegeldussignaalide eraldamise meetodil. Seda meetodit kasutatakse väga sageli kaja- ja impulssradaris.
Impulssgeneraator genereerib lühiajalisi vooluimpulsse, mis seejärel sisenevad kiirgavasse mähisesse. Siin muudetakse need juba magnetinduktsiooni impulssideks. Kuna impulssgeneraator, s.o. Kiirgav mähis on induktiivse iseloomuga, "ülekoormused" tekivad impulsside rindel pingelanguste kujul. Need pursked võivad ulatuda kümnete või isegi sadade voltide amplituudini. Kaitsepiirajaid on siiski parem mitte kasutada, sest. impulssvoolu ja magnetinduktsiooni esiosa saab tõmmata. Selle tulemusena muutub peegeldava tüüpi signaali eraldamise protsess keerulisemaks.

Impulssmetallidetektori skeem
Tuleb märkida, et kiirgavaid ja vastuvõtvaid mähiseid saab paigutada täiesti suvalises järjekorras. See on tingitud asjaolust, et väljastatava signaali läbitungimine ja peegeldunud signaali mõju poolile on teatud ajavahemike jooksul eraldatud. Lisaks võib sama mähis täita mis tahes rolli: nii signaali vastu võtta kui ka seda peegeldada.
6. Magnetomeetrid
Magnetomeetrid on seadmed, mille eesmärk on muuta magnetvälja indikaatoreid. Samas saab magnetomeetreid kasutada ka metallidetektorina. See on võimalik tänu sellele, et Maa magnetväli võib olla moonutatud. erinevaid materjale ferromagnetiliste omadustega, näiteks raud. Selliste objektide tuvastamine toimub teatud piirkonna esialgsest magnetvälja moodulist kõrvalekallete registreerimisega. Selle tulemusena võib täheldada mõningast magnetilist ebahomogeensust (anomaaliaid), mida võivad põhjustada metallesemed.
Erinevalt eespool käsitletud metallidetektoritest hõlmavad magnetomeetrid suuremat valikut rauast esemeid. Tõenäoliselt on paljud kuulnud magnetomeetri abil näiteks operaatorist 10 meetri kaugusel asuva auto leidmisest. Samal ajal on magnetomeetrite peamine puudus nende võimetus tuvastada värvilistest metallidest valmistatud esemeid. Lisaks suudab magnetomeeter reageerida mitte ainult rauale, vaid ka nn looduslikele magnetilistele anomaaliatele. Need võivad olla näiteks maavaramaardlad või üksikud maavarad jne.

Magnetomeetri ahel
7. Radarid
Iga radari tööpõhimõte põhineb elektromagnetilise energia, selle peegelduse ja vastuvõtmise meetodil erinevatelt õhus, merel või maal asuvatelt objektidelt. Peegeldunud signaal võetakse vastu edasiseks töötlemiseks ja analüüsiks. Tänu sellele saate täpselt määrata huvipakkuva objekti asukoha, selle kiiruse ja trajektoori.
Radaritel on mitmeid vaieldamatuid eeliseid. Seega võimaldavad need töötada üsna suurte vahemaadega. Peegeldunud signaali võib pidada selliseks, et see järgib täielikult seadusi geomeetriline optika, ja selle sumbumine on võrdeline ainult kauguse teise astmega. Samas on radari tõsiseks puuduseks see, et elektromagnetlaineid kiirgades võimaldab see leida oma asukoha. Nüüd aga otsitakse intensiivselt meetodeid, mis aitaksid radarite allkirju peita ja on täiesti võimalik, et lähitulevikus õnnestub sellest puudusest lahti saada.